Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 146 results human clear search
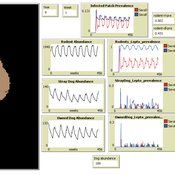
Peer reviewed The foraging potential of the Holocene Cape South Coast of South Africa without the Palaeo-Agulhas Plain
Marco Janssen Colin Wren | Published Monday, August 12, 2019The Palaeo-Agulhas Plain formed an important habitat exploited by Pleistocene hunter-gatherer populations during periods of lower sea level. This productive, grassy habitat would have supported numerous large-bodied ungulates accessible to a population of skilled hunters with the right hunting technology. It also provided a potentially rich location for plant food collection, and along its shores a coastline that moved with the rise and fall of sea levels. The rich archaeological and paleontological records of Pleistocene sites along the modern Cape south coast of South Africa, which would have overlooked the Palaeo-Agulhas Plain during Pleistocene times of lower sea level, provides a paleoarchive of this extinct ecosystem. In this paper, we present a first order illustration of the “palaeoscape modeling” approach advocated by Marean et al. (2015). We use a resourcescape model created from modern studies of habitat productivity without the Palaeo-Agulhas Plain. This is equivalent to predominant Holocene conditions. We then run an agent-based model of the human foraging system to investigate several research questions. Our agent-based approach uses the theoretical framework of optimal foraging theory to model human foraging decisions designed to optimize the net caloric gains within a complex landscape of spatially and temporally variable resources. We find that during the high sea-levels of MIS 5e (+5-6 m asl) and the Holocene, the absence of the Plain left a relatively poor food base supporting a much smaller population relying heavily on edible plant resources from the current Cape flora. Despite high species diversity of plants with edible storage organs, and marine invertebrates, encounter rates with highly profitable resources were low. We demonstrate that without the Palaeo-Agulhas Plain, human populations must have been small and low density, and exploited plant, mammal, and marine resources with relatively low caloric returns. The exposure and contraction of the Palaeo-Agulhas Plain was likely the single biggest driver of behavioral change during periods of climate change through the Pleistocene and into the transition to the Holocene.
Agents with Values and Norms in the Ultimatum Game
rmercuur | Published Wednesday, June 12, 2019This model accompanies a paper looking at the role and limits of values and norms for modeling realistic social agents. Based on literature we synthesize a theory on norms and a theory that combines both values and norms. In contrast to previous work, these theories are checked against data on human behavior obtained from a psychological experiment on dividing money: the ultimatum game. We found that agents that act according to a theory that combines both values and norms, produce behavior quite similar to that of humans. Furthermore, we found that this theory is more realistic than theories solely concerned with norms or theories solely concerned with values. However, to explain the amount of money people accept in this ultimatum game we will eventually need an even more realistic theory. We propose that a theory that explains when people exactly choose to use norms instead of values could provide this realism.
BENCHv.2 model
Leila Niamir | Published Sunday, April 28, 2019The BENCH agent-based model is designed and developed to study shifts in residential energy use and corresponding emissions driven by behavioral changes among heterogeneous individuals.
WOLVES - simulating wolf reappearance in the Netherlands
Kim van Vliet Zoë Delamore | Published Saturday, April 27, 2019This is an agent-based model, simulating wolf (Canis Lupus) reappearance in the Netherlands. The model’s purpose is to allow researchers to investigate the reappearance of wolves in the Netherlands and the possible effect of human interference. Wolf behaviour is modelled according to the literature. The suitability of the Dutch landscape for wolf settlement has been determined by Lelieveld (2012) [1] and is transformed into a colour-coded map of the Netherlands. The colour-coding is the main determinant of wolf settlement. Human involvement is modelled through the public opinion, which varies according to the size, composition and behaviour of the wolf population.
[1] Lelieveld, G.: Room for wolf comeback in the Netherlands, (2012).
FNNR-ABM
Judy Mak | Published Thursday, February 28, 2019 | Last modified Saturday, December 07, 2019FNNR-ABM is an agent-based model that simulates human activity, Guizhou snub-nosed monkey movement, and GTGP-enrolled land parcel conversion in the Fanjingshan National Nature Reserve in Guizhou, China.
Quick-start guide:
1. Install Python and set environmental path variables.
2. Install the mesa, matplotlib (optional), and pyshp (optional) Python libraries.
3. Configure fnnr_config_file.py.
…
Peer reviewed MHMSLeptoDy (Multi-host, multi-serovar Leptospira Dynamics Model)
Aniruddha Belsare Matthew Gompper Meghan Mason Claudia Munoz-Zanzi | Published Tuesday, January 29, 2019 | Last modified Tuesday, March 12, 2019Leptospirosis is a neglected, bacterial zoonosis with worldwide distribution, primarily a disease of poverty. More than 200 pathogenic serovars of Leptospira bacteria exist, and a variety of species may act as reservoirs for these serovars. Human infection is the result of direct or indirect contact with Leptospira bacteria in the urine of infected animal hosts, primarily livestock, dogs, and rodents. There is increasing evidence that dogs and dog-adapted serovar Canicola play an important role in the burden of leptospirosis in humans in marginalized urban communities. What is needed is a more thorough understanding of the transmission dynamics of Leptospira in these marginalized urban communities, specifically the relative importance of dogs and rodents in the transmission of Leptospira to humans. This understanding will be vital for identifying meaningful intervention strategies.
One of the main objectives of MHMSLeptoDy is to elucidate transmission dynamics of host-adapted Leptospira strains in multi-host system. The model can also be used to evaluate alternate interventions aimed at reducing human infection risk in small-scale communities like urban slums.

Bicycle model
Gudrun Wallentin Dana Kaziyeva Martin Loidl | Published Thursday, January 10, 2019 | Last modified Monday, February 22, 2021The purpose of the model is to generate the spatio-temporal distribution of bicycle traffic flows at a regional scale level. Disaggregated results are computed for each network segment with the minute time step. The human decision-making is governed by probabilistic rules derived from the mobility survey.
CHAAHK: a Spatial Simulation of the Maya Elevated Core Region
Alex Kara | Published Tuesday, December 04, 2018 | Last modified Thursday, September 26, 2019This thesis presents an abstract spatial simulation model of the Maya Central Lowlands coupled human and natural system from 1000 BCE to the present day. It’s name is the Climatically Heightened but Anothropogenically Achieved Historical Kerplunk model (CHAAHK). The simulation features features virtual human groups, population centers, transit routes, local resources, and imported resources. Despite its embryonic state, the model demonstrates how certain anthropogenic characteristics of a landscape can interact with externally induced trauma and result in a prolonged period of relative sociopolitical uncomplexity. Analysis of batch simulation output suggests decreasing empirical uncertainties about ancient wetland modification warrants more investment. This first submission of CHAAHK’s code represents the simulation’s implementation that was featured in the author’s master’s thesis.

Peer reviewed Zimbabwe Agro-Pastoral Management Model (ZAPMM): Musimboti wevanhu, zvipfuo nezvirimwa
MV Eitzel Solera Kleber Tulio Neves Jon Solera Kenneth B Wilson Abraham Mawere Ndlovu Aaron C Fisher André Veski Oluwasola E Omoju Emmanuel Mhike Hove | Published Tuesday, June 19, 2018This model has been created with and for the researcher-farmers of the Muonde Trust (http://www.muonde.org/), a registered Zimbabwean non-governmental organization dedicated to fostering indigenous innovation. Model behaviors and parameters (mashandiro nemisiyano nedzimwe model) derive from a combination of literature review and the collected datasets from Muonde’s long-term (over 30 years) community-based research. The goals of this model are three-fold (muzvikamu zvitatu):
A) To represent three components of a Zimbabwean agro-pastoral system (crops, woodland grazing area, and livestock) along with their key interactions and feedbacks and some of the human management decisions that may affect these components and their interactions.
B) To assess how climate variation (implemented in several different ways) and human management may affect the sustainability of the system as measured by the continued provisioning of crops, livestock, and woodland grazing area.
C) To provide a discussion tool for the community and local leaders to explore different management strategies for the agro-pastoral system (hwaro/nzira yekudyidzana kwavanhu, zvipfuo nezvirimwa), particularly in the face of climate change.
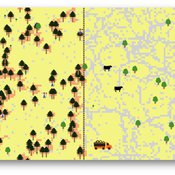
TRUE GRASP (Tree Recruitment Under Exotic GRAsses in a Savanna-Pineland)
is a socio-ecological agent-based model (ABM) and role playing game (RPG) for farmers and other stakeholders involved in rural landscape planning.
The purpose of this model is to allow actors to explore the individual and combined effects - as well as tradeoffs - of three methods of controlling exotic grasses in pine savannas: fire, weeding, and grazing cattle.
Design of TRUE GRASP is based on 3 years of socio-ecological fieldwork in a human-induced pine savanna in La Sepultura Biosphere Reserve (SBR) in the Mexican state of Chiapas. In this savanna, farmers harvest resin from Pinus oocarpa, which is used to produce turpentine and other products. However, long term persistence of this activity is jeopardized by low tree recruitment due to exotic tall grass cover in the forest understory (see Braasch et al., 2017). The TRUE GRASP model provides the user with different management strategies for controlling exotic grass cover and avoiding possible regime shifts, which in the case of the SBR would jeopardize resin harvesting.
Displaying 10 of 146 results human clear search