Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 58 results movement clear search

Agent modeling (ABM) as a tool to improve the mobility of “avoidant” birds in an ecological corridor in the localities of Chapinero, Teusaquillo, Barrios Unidos and Engativá of Bogotá city
Paula Alejandra Meza Maria Angela Echeverry-Galvis Mauricio González Méndez | Published Wednesday, June 24, 2026The purpose of this model is to analyze different configurations and scenarios of ecological corridors to simulate the movement of three avoider bird species at a local scale: Chondrohierax uncinatus (Accipitridae), a large carnivorous bird; Ampelion rubrocristatus (Cotingidae), a species that seeks areas with substantial land cover for refuge and rest; and Coeligena bonapartei (Trochilidae), a large hummingbird that prefers areas with a rich and diverse food supply. The model focusses on juvenile bird individuals seeking refuge and food, taking into account the mobility parameters of each species and the existing land cover types within the study area.
Specifically, the model aims to:
• Simulate the movement of 45 avoiders birds which are considered umbrella species sensitive to urban changes (which were chosen based on their specific biological and ecological requirements and parameters relevant to urban conservation efforts), 15 avoiders birds per specie to cross a two-dimensional world predominant urban.
• To be able to select which corridor scenario would be the most beneficial, in order to help the mobility of other species affected by urban fragmentation.
• Contribute to urban ecology research and support decision-making processes by relevant stakeholders.
Aquarium
Yunshuo Tang | Published Tuesday, May 26, 2026This model simulates a simple aquatic ecosystem containing fish and food. It explores how individual interactions such as movement, feeding, and reproduction shape the population dynamics of fish over time.
Peer reviewed Gradient Descent Simulation
Ilyes Azouani | Published Wednesday, March 18, 2026 | Last modified Monday, May 25, 2026This model visualizes gradient descent optimization - the fundamental algorithm used to train neural networks and other machine learning models. Agents represent different optimization algorithms searching for the minimum of a loss landscape (the “error surface” that ML models try to minimize during training).
The model demonstrates how different optimizer types (SGD, Momentum with different parameters) behave on various loss landscapes, from simple bowls to the notoriously difficult Rosenbrock “banana valley” function. This helps build intuition about why certain optimization algorithms work better than others for different problem geometries.
HOW IT WORKS
…
Exploring the aftermath of transition failures: An agent-based model
Gangmin Park Junmin Lee Jisoo Lee Keungoui Kim | Published Friday, March 06, 2026This computational model is an agent-based model (ABM) developed to investigate how repeated failures of emerging niches accumulate and influence the trajectory of socio-technical transitions. Built in AnyLogic 8.7.11, the model simulates the dynamic interactions between a dominant regime and sequential niche entrants within a two-dimensional practice space. It models alignment, movement, and competition based on technological maturity and market penetration. The model utilizes a reinforcing feedback structure linking consumer support, output, resource accumulation, and capacity development (Physical and Institutional Capacity). A complete model specification following the ODD+D (Overview, Design concepts, Details, and Decision) protocol is included in the documentation.
Peer reviewed MicroAnts 2.5
Diogo Alves | Published Thursday, October 16, 2025MicroAnts 2.5 is a general-purpose agent-based model designed as a flexible workhorse for simulating ecological and evolutionary dynamics in artificial populations, as well as, potentially, the emergence of political institutions and economic regimes. It builds on and extends Stephen Wright’s original MicroAnts 2.0 by introducing configurable predators, inequality tracking, and other options.
Ant agents are of two tyes/casts and controlled by 16-bit chromosomes encoding traits such as vision, movement, mating thresholds, sensing, and combat strength. Predators (anteaters) operate in static, random, or targeted predatory modes. Ants reproduce, mutate, cooperate, fight, and die based on their traits and interactions. Environmental pressures (poison and predators) and social dynamics (sharing, mating, combat) drive emergent behavior across red and black ant populations.
The model supports insertion of custom agents at runtime, configurable mutation/inversion rates, and exports detailed statistics, including inequality metrics (e.g., Gini coefficients), trait frequencies, predator kills, and lineage data. Intended for rapid testing and educational experimentation, MicroAnts 2.5 serves as a modular base for more complex ecological and social simulations.
Urban Teacher Lifecycle and Mobility
Yevgeny Patarakin | Published Wednesday, July 23, 2025This agent-based model simulates the lifecycle, movement, and satisfaction of teachers within an urban educational system composed of multiple universities and schools. Each teacher agent transitions through several possible roles: newcomer, university student, unemployed graduate, and employed teacher. Teachers’ pathways are shaped by spatial configuration, institutional capacities, individual characteristics, and dynamic interactions with schools and universities. Universities are assigned spatial locations with a controllable level of centralization and are characterized by academic ratings, capacity, and alumni records. Schools are distributed throughout the city, each with a limited number of vacancies, hiring requirements, and offered salaries. Teachers apply to universities based on the alignment of their personal academic profiles with institutional ratings, pursue studies, and upon graduation become candidates for employment at schools.
The employment process is driven by a decentralized matching of teacher expectations and school offers, taking into account factors such as salary, proximity, and peer similarity. Teachers’ satisfaction evolves over time, reflecting both institutional characteristics and the composition of their colleagues; low satisfaction may prompt teachers to transfer between schools within their mobility radius. Mortality and teacher attrition further shape workforce dynamics, leading to continuous recruitment of newcomers to maintain a stable population. The model tracks university reputation through the academic performance and number of alumni, and visualizes key metrics including teacher status distribution, school staffing, university alumni counts, and overall satisfaction. This structure enables the exploration of policy interventions, hiring and training strategies, and the impact of spatial and institutional design on the allocation, retention, and happiness of urban educational staff.
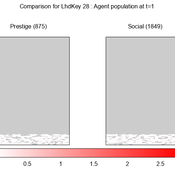
We provide a theory-grounded, socio-geographic agent-based model to present a possible explanation for human movement in the Adriatic region within the Cetina phenomenon.
Focusing on ideas of social capital theory from Piere Bordieu (1986), we implement agent mobility in an abstract geography based on cultural capital (prestige) and social capital (social position). Agents hold myopic representations of social (Schaff, 2016) and geographical networks and decide in a heuristic way on moving (and where) or staying.
The model is implemented in a fork of the Laboratory for Simulation Development (LSD), appended with GIS capabilities (Pereira et. al. 2020).
Peer reviewed AgModel
Isaac Ullah | Published Friday, December 06, 2024AgModel is an agent-based model of the forager-farmer transition. The model consists of a single software agent that, conceptually, can be thought of as a single hunter-gather community (i.e., a co-residential group that shares in subsistence activities and decision making). The agent has several characteristics, including a population of human foragers, intrinsic birth and death rates, an annual total energy need, and an available amount of foraging labor. The model assumes a central-place foraging strategy in a fixed territory for a two-resource economy: cereal grains and prey animals. The territory has a fixed number of patches, and a starting number of prey. While the model is not spatially explicit, it does assume some spatiality of resources by including search times.
Demographic and environmental components of the simulation occur and are updated at an annual temporal resolution, but foraging decisions are “event” based so that many such decisions will be made in each year. Thus, each new year, the foraging agent must undertake a series of optimal foraging decisions based on its current knowledge of the availability of cereals and prey animals. Other resources are not accounted for in the model directly, but can be assumed for by adjusting the total number of required annual energy intake that the foraging agent uses to calculate its cereal and prey animal foraging decisions. The agent proceeds to balance the net benefits of the chance of finding, processing, and consuming a prey animal, versus that of finding a cereal patch, and processing and consuming that cereal. These decisions continue until the annual kcal target is reached (balanced on the current human population). If the agent consumes all available resources in a given year, it may “starve”. Starvation will affect birth and death rates, as will foraging success, and so the population will increase or decrease according to a probabilistic function (perturbed by some stochasticity) and the agent’s foraging success or failure. The agent is also constrained by labor caps, set by the modeler at model initialization. If the agent expends its yearly budget of person-hours for hunting or foraging, then the agent can no longer do those activities that year, and it may starve.
Foragers choose to either expend their annual labor budget either hunting prey animals or harvesting cereal patches. If the agent chooses to harvest prey animals, they will expend energy searching for and processing prey animals. prey animals search times are density dependent, and the number of prey animals per encounter and handling times can be altered in the model parameterization (e.g. to increase the payoff per encounter). Prey animal populations are also subject to intrinsic birth and death rates with the addition of additional deaths caused by human predation. A small amount of prey animals may “migrate” into the territory each year. This prevents prey animals populations from complete decimation, but also may be used to model increased distances of logistic mobility (or, perhaps, even residential mobility within a larger territory).
…
Agent-Based Model of Transhumant Decision-Making Processes in Senegal
Cheick Amed Diloma Gabriel TRAORE Etienne DELAY Alassane Bah Djibril Diop | Published Wednesday, July 03, 2024Sahelian transhumance is a type of socio-economic and environmental pastoral mobility. It involves the movement of herds from their terroir of origin (i.e., their original pastures) to one or more host terroirs, followed by a return to the terroir of origin. According to certain pastoralists, the mobility of herds is planned to prevent environmental degradation, given the continuous dependence of these herds on their environment. However, these herds emit Greenhouse Gases (GHGs) in the spaces they traverse. Given that GHGs contribute to global warming, our long-term objective is to quantify the GHGs emitted by Sahelian herds. The determination of these herds’ GHG emissions requires: (1) the artificial replication of the transhumance, and (2) precise knowledge of the space used during their transhumance.
This article presents the design of an artificial replication of the transhumance through an agent-based model named MSTRANS. MSTRANS determines the space used by transhumant herds, based on the decision-making process of Sahelian transhumants.
MSTRANS integrates a constrained multi-objective optimization problem and algorithms into an agent-based model. The constrained multi-objective optimization problem encapsulates the rationality and adaptability of pastoral strategies. Interactions between a transhumant and its socio-economic network are modeled using algorithms, diffusion processes, and within the multi-objective optimization problem. The dynamics of pastoral resources are formalized at various spatio-temporal scales using equations that are integrated into the algorithms.
The results of MSTRANS are validated using GPS data collected from transhumant herds in Senegal. MSTRANS results highlight the relevance of integrated models and constrained multi-objective optimization for modeling and monitoring the movements of transhumant herds in the Sahel. Now specialists in calculating greenhouse gas emissions have a reproducible and reusable tool for determining the space occupied by transhumant herds in a Sahelian country. In addition, decision-makers, pastoralists, veterinarians and traders have a reproducible and reusable tool to help them make environmental and socio-economic decisions.
Shellmound Mobility
Henrique de Sena Kozlowski | Published Saturday, June 15, 2024Least Cost Path (LCP) analysis is a recurrent theme in spatial archaeology. Based on a cost of movement image, the user can interpret how difficult it is to travel around in a landscape. This kind of analysis frequently uses GIS tools to assess different landscapes. This model incorporates some aspects of the LCP analysis based on GIS with the capabilities of agent-based modeling, such as the possibility to simulate random behavior when moving. In this model the agent will travel around the coastal landscape of Southern Brazil, assessing its path based on the different cost of travel through the patches. The agents represent shellmound builders (sambaquieiros), who will travel mainly through the use of canoes around the lagoons.
How it works?
When the simulation starts the hiker agent moves around the world, a representation of the lagoon landscape of the Santa Catarina state in Southern Brazil. The agent movement is based on the travel cost of each patch. This travel cost is taken from a cost surface raster created in ArcMap to represent the different cost of movement around the landscape. Each tick the agent will have a chance to select the best possible patch to move in its Field of View (FOV) that will take it towards its target destination. If it doesn’t select the best possible patch, it will randomly choose one of the patches to move in its FOV. The simulation stops when the hiker agent reaches the target destination. The elevation raster file and the cost surface map are based on a 1 Arc-second (30m) resolution SRTM image, scaled down 5 times. Each patch represents a square of 150m, with an area of 0,0225km². The dataset uses a UTM Sirgas 2000 22S projection system. There are four different cost functions available to use. They change the cost surface used by the hikers to navigate around the world.
Displaying 10 of 58 results movement clear search