Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 19 results traffic clear search
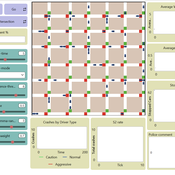
Amber Dilemma Zone: Driver Cognition and Signal Control in Urban Traffic
Mansoor Abdul Bari | Published Sunday, July 19, 2026This model is an extension of Wilensky’s (2003) Traffic Grid, a foundational NetLogo model of urban traffic flow. It embeds a dual-process cognitive architecture into each driver agent, transforming the original’s identical reactive units into cognitively heterogeneous individuals whose internal mental state evolves with experience; making the same intersection produce different decisions from different drivers, and different decisions from the same driver across occasions.
The core question the model addresses is the yellow-light dilemma zone: the seconds following amber onset in which a driver can neither stop safely nor clear the intersection before red. Field research documents that behavioral variance at this moment cannot be explained by geometry or legal obligation alone. This model provides the cognitive architecture that has been missing from traffic ABMs.
Each driver routes every amber-onset decision through either System 1 (fast, heuristic, automatic) or System 2 (slow, deliberative, prospect-theoretic), switching dynamically based on cognitive load, accumulated near-miss memory, and situational framing. The result is crash outcomes that are attributable, path-dependent, and sensitive to both driver disposition and signal infrastructure; none of which fixed-rule models can reproduce. Three signal control modes are included: fixed-cycle (replicating Wilensky’s original), adaptive-queue, and smart occupancy-based switching.
A Data-Driven Approach of Layout Evaluation for Electric Vehicle Charging Infrastructure Using Agent-Based Simulation and GIS
yue zhang | Published Thursday, September 21, 2023The development and popularisation of new energy vehicles have become a global consensus. The shortage and unreasonable layout of electric vehicle charging infrastructure (EVCI) have severely restricted the development of electric vehicles. In the literature, many methods can be used to optimise the layout of charging stations (CSs) for producing good layout designs. However, more realistic evaluation and validation should be used to assess and validate these layout options. This study suggested an agent-based simulation (ABS) model to evaluate the layout designs of EVCI and simulate the driving and charging behaviours of electric taxis (ETs). In the case study of Shenzhen, China, GPS trajectory data were used to extract the temporal and spatial patterns of ETs, which were then used to calibrate and validate the actions of ETs in the simulation. The ABS model was developed in a GIS context of an urban road network with travelling speeds of 24 h to account for the effects of traffic conditions. After the high-resolution simulation, evaluation results of the performance of EVCI and the behaviours of ETs can be provided in detail and in summary. Sensitivity analysis demonstrates the accuracy of simulation implementation and aids in understanding the effect of model parameters on system performance. Maximising the time satisfaction of ET users and reducing the workload variance of EVCI were the two goals of a multiobjective layout optimisation technique based on the Pareto frontier. The location plans for the new CS based on Pareto analysis can significantly enhance both metrics through simulation evaluation.
Pedestrian model
Gudrun Wallentin Dana Kaziyeva Martin Loidl Petra Stutz | Published Monday, August 07, 2023The model generates disaggregated traffic flows of pedestrians, simulating their daily mobility behaviour represented as probabilistic rules. Various parameters of physical infrastructure and travel behaviour can be altered and tested. This allows predicting potential shifts in traffic dynamics in a simulated setting. Moreover, assumptions in decision-making processes are general for mid-sized cities and can be applied to similar areas.
Together with the model files, there is the ODD protocol with the detailed description of model’s structure. Check the associated publication for results and evaluation of the model.
Installation
Download GAMA-platform (GAMA1.8.2 with JDK version) from https://gama-platform.github.io/. The platform requires a minimum of 4 GB of RAM.
…
Urban waterlogging disaster evaluation based on complex network a case study of Zhengzhou, China
Chao Ding Jia Xu | Published Monday, April 17, 2023The model constructs a complex network of traffic based on the main urban area of Zhengzhou, China, and simulates the urban rainfall process using the ABM model to analyse the real-time risk of flooding hazards in the nodes of the complex network.

Modelling an intersection with traffic signal countdown timer
Eduard | Published Thursday, May 19, 2022Developed as a part of a project in the University of Augsburg, Institute of Geography, it simulates the traffic in an intersection or junction which uses either regular traffic lights or traffic lights with a countdown timer. The model tracks the average speed of cars before and after traffic lights as well as the throughput.
Physical activity promotion and the United Nations Sustainable Development Goals
Leandro Garcia Ivana Stankov Rahul Goel | Published Tuesday, March 01, 2022This model was created to investigate the potential impacts of large-scale recreational and transport-related physical activity promotion strategies on six United Nations Sustainable Development Goals (SDGs) related outcomes—road traffic deaths (SDG 3), transportation mode share (SDG 9), convenient access to public transport, levels of fine particulate matter, and access to public open spaces (SDG 11), and levels of carbon dioxide emissions (SDG 13)—in three cities designed as abstract representations of common city types in high-, middle-, and low-income countries.

Pedestrian Scramble
Sho Takami Rami Lake Dara Vancea | Published Tuesday, November 30, 2021 | Last modified Tuesday, June 10, 2025This is a model intended to demonstrate the function of scramble crossings and a more efficient flow of pedestrian traffic with the presence of diagonal crosswalks.
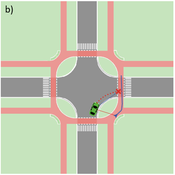
Agent-based Line-of-Sight Simulation for safer Crossings (Short Paper - Netlogo Model)
Vincent Franke | Published Thursday, August 05, 2021This software simulates cars and bicycles as traffic participants while crossing different crossroad designs such as roundabouts, protected crossroads and standard crossroads. It is written in Netlogo 6.2 and aims to identify safety characteristics of these layouts using agent-based modeling. Participants track the line of sight to each other and print them as an output alongside with the adjacent destination, used layout, count of collisions/cars/bicycles and time.
Detailed information can be found within the info tab of the program itself.
Simulating changing traffic flow caused by new bus route in Augsburg
Eduard | Published Wednesday, August 04, 2021This is a Netlogo model which simulates car and bus/tram traffic in Augsburg, specifically between the districts Stadtbergen, Göggingen and the Königsplatz. People either use their cars or public transport to travel to one of their random destinations (Stadtbergen or Göggingen), performing some activity and then returning to their home. Attributes such as travel and waiting time as well as their happiness upon arriving are stored and have an impact on individuals on whether they would consider changing their mode of transport or not.
SiFlo: An Agent-based Model to simulate inhabitants’ behavior during a flood event
Patrick Taillandier Franck Taillandier Pascal Di Maiolo Rasool Mehdizadeh | Published Thursday, July 29, 2021SiFlo is an ABM dedicated to simulate flood events in urban areas. It considers the water flowing and the reaction of the inhabitants. The inhabitants would be able to perform different actions regarding the flood: protection (protect their house, their equipment and furniture…), evacuation (considering traffic model), get and give information (considering imperfect knowledge), etc. A special care was taken to model the inhabitant behavior: the inhabitants should be able to build complex reasoning, to have emotions, to follow or not instructions, to have incomplete knowledge about the flood, to interfere with other inhabitants, to find their way on the road network. The model integrates the closure of roads and the danger a flooded road can represent. Furthermore, it considers the state of the infrastructures and notably protection infrastructures as dyke. Then, it allows to simulate a dyke breaking.
The model intends to be generic and flexible whereas provide a fine geographic description of the case study. In this perspective, the model is able to directly import GIS data to reproduce any territory. The following sections expose the main elements of the model.
Displaying 10 of 19 results traffic clear search