About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 19 results land-use change clear search
Integrate land use policies into the agent-based model to simulate land use change
Jing Gao | Published Sunday, June 09, 2024Detailed information will be presented after the journal paper is published.
Critical Sustainability Transitions: Relaunching local agriculture after decline (Model code and description)
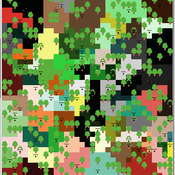
Pedro Lopez-Merino | Published Tuesday, April 30, 2024This model simulates the dynamics of agricultural land use change, specifically the transition between agricultural and non-agricultural land use in a spatial context. It explores the influence of various factors such as agricultural profitability, path dependency, and neighborhood effects on land use decisions.
The model operates on a grid of patches representing land parcels. Each patch can be in one of two states: exploited (green, representing agricultural land) or unexploited (brown, representing non-agricultural land). Agents (patches) transition between these states based on probabilistic rules. The main factors affecting these transitions are agricultural profitability, path dependency, and neighborhood effects.
-Agricultural Profitability: This factor is determined by the prob-agri function, which calculates the probability of a non-agricultural patch converting to agricultural based on income differences between agriculture and other sectors. -Path Dependency: Represented by the path-dependency parameter, it influences the likelihood of patches changing their state based on their current state. It’s a measure of inertia or resistance to change. -Neighborhood Effects: The neighborhood function calculates the number of exploited (agricultural) neighbors of a patch. This influences the decision of a patch to convert to agricultural land, representing the influence of surrounding land use on the decision-making process.

ABSOLUG - Agent-based simulation of land-use governance
Marius von Essen | Published Monday, January 10, 2022 | Last modified Tuesday, September 06, 2022The agent-based simulation of land-use governance (ABSOLUG) is a NetLogo model designed to explore the interactions between stakeholders and the impact of multi-stakeholder governance approaches on tropical deforestation. The purpose of ABSOLUG is to advance our understanding of land use governance, identify macro-level patterns of interaction among governments, commodity producers, and NGOs in tropical deforestation frontiers, and to set a foundation for generating middle-range theories for multi-stakeholder governance approaches. The model represents a simplified, generic, tropical commodity production system, as opposed to a specific empirical case, and as such aims to generate interpretable macro-level patterns that are based on plausible, micro-level behavioral rules. It is designed for scientists interested in land use governance of tropical commodity production systems, and for decision- and policy-makers seeking to develop or enhance governance schemes in multi-stakeholder commodity systems.
WEEM (Woodlot Establishment and Expansion Model)
Jürgen Groeneveld Vianny Ahimbisibwe Uta Berger Melvin Lippe Susan Balaba Tumwebaze Eckhard Auch | Published Monday, September 27, 2021The agent-based model WEEM (Woodlot Establishment and Expansion Model) as described in the journal article, has been designed to make use of household socio-demographics (household status, birth, and death events of households), to better understand the temporal dynamics of woodlot in the buffer zones of Budongo protected forest reserve, Masindi district, Uganda. The results contribute to a mechanistic understanding of what determines the current gap between intention and actual behavior in forest land restoration at farm level.

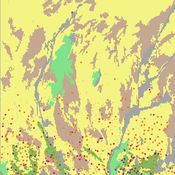
We construct a new type of agent-based model (ABM) that can simultaneously simulate land-use changes at multiple distant places (namely TeleABM, telecoupled agent-based model). We use soybean trade between Brazil and China as an example, where Brazil is the sending system and China is the receiving system because they are the world’s largest soybean exporter and importer respectively. We select one representative county in each country to calibrate and validate the model with spatio-temporal analysis of historical land-use changes and the empirical analysis of household survey data. The whole model is programmed on RePast Simphony. The most unique features of TeleABM are that it can simulate a telecoupled system and the flows between sending and receiving systems in this telecoupled system.
Mitigating bioenergy-driven biodiversity decline: a modelling approach with the European brown hare
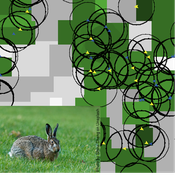
Volker Grimm Maria Langhammer | Published Wednesday, November 13, 2019 | Last modified Tuesday, November 24, 2020The model is designed to analyse the effects of mitigation measures on the European brown hare (Lepus europaeus), which is directly affected by ongoing land use change and has experienced widespread decline throughout Europe since the 1960s. As an input, we use two 4×4 km large model landscapes, which were generated by a landscape generator based on real field sizes and crop proportions and differed in average field size and crop composition. The crops grown annually are evaluated in terms of forage suitability, breeding suitability and crop richness for the hare. Six mitigation scenarios are implemented, defined by a 10 % increase in: (1) mixed silphie, (2) miscanthus, (3) grass-clover ley, (4) alfalfa, (5) set-aside, and (6) general crop richness. The model shows that that both landscape configuration and composition have a significant effect on hare population development, which responds particularly strongly to compositional changes.
Coastal Coupled Housing and Land Markets (C-CHALMS)
Nicholas Magliocca | Published Thursday, May 18, 2017Next generation of the CHALMS model applied to a coastal setting to investigate the effects of subjective risk perception and salience decision-making on adaptive behavior by residents.
Managing ecological disturbances: Learning and the structure of social-ecological networks
Jacopo A. Baggio Vicken Hillis | Published Friday, March 03, 2017 | Last modified Thursday, August 02, 2018The aim of this model is to explore and understand the factors driving adoption of treatment strategies for ecological disturbances, considering payoff signals, learning strategies and social-ecological network structure
TREELIM
Gudrun Wallentin | Published Wednesday, November 30, 2016 | Last modified Tuesday, January 10, 2017The model simulates the spatial patterns of secondary forest succession above the current alpine tree line in the context of land use and climate change. Three scenarios are offered: (1) climate change, (2) land use change, (3) species composition.
FEARLUS-SPOMM
Dawn Parker Gary Polhill Nick Gotts Alistair Law Luis Izquierdio Alessandro Gimona Lee-Ann Sutherland | Published Friday, March 25, 2016This is a coupled conceptual model of agricultural land decision-making and incentivisation and species metacommunities.
Displaying 10 of 19 results land-use change clear search