Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 175 results for "Woi Sok Oh" clear search
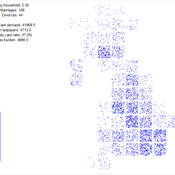
Simulating the cost of social care in an ageing population
Eric Silverman | Published Thursday, September 16, 2021This model is an agent-based simulation written in Python 2.7, which simulates the cost of social care in an ageing UK population. The simulation incorporates processes of population change which affect the demand for and supply of social care, including health status, partnership formation, fertility and mortality. Fertility and mortality rates are drawn from UK population data, then projected forward to 2050 using the methods developed by Lee and Carter 1992.
The model demonstrates that rising life expectancy combined with lower birthrates leads to growing social care costs across the population. More surprisingly, the model shows that the oft-proposed intervention of raising the retirement age has limited utility; some reductions in costs are attained initially, but these reductions taper off beyond age 70. Subsequent work has enhanced and extended this model by adding more detail to agent behaviours and familial relationships.
The version of the model provided here produces outputs in a format compatible with the GEM-SA uncertainty quantification software by Kennedy and O’Hagan. This allows sensitivity analyses to be performed using Gaussian Process Emulation.
We propose here a computational model of school segregation that is aligned with a corresponding Schelling-type model of residential segregation. To adapt the model for application to school segregation, we move beyond previous work by combining two preference arguments in modeling parents’ school choice, preferences for the ethnic composition of a school and preferences for minimizing the travelling distance to the school.
Peer reviewed A Bayesian Nash Equilibrium (BNE)-informed ABM for pedestrian evacuation in different constricted spaces
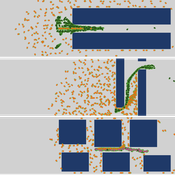
Jiaqi Ge Yiyu Wang Alexis Comber | Published Wednesday, October 11, 2023This BNE-informed ABM ultimately aims to provide a more realistic description of complicated pedestrian behaviours especially in high-density and life-threatening situations. Bayesian Nash Equilibrium (BNE) was adopted to reproduce interactive decision-making process among rational and game-playing agents. The implementations of 3 behavioural models, which are Shortest Route (SR) model, Random Follow (RF) model, and BNE model, make it possible to simulate emergent patterns of pedestrian behaviours (e.g. herding and self-organised queuing behaviours, etc.) in emergency situations.
According to the common features of previous mass trampling accidents, a series of simulation experiments were performed in space with 3 types of barriers, which are Horizontal Corridors, Vertical Corridors, and Random Squares, standing for corridors, bottlenecks and intersections respectively, to investigate emergent behaviours of evacuees in varied constricted spatial environments. The output of this ABM has been available at https://data.mendeley.com/datasets/9v4byyvgxh/1.
Nice Musical Chairs
Andreas Angourakis | Published Friday, February 05, 2016 | Last modified Friday, November 17, 2017The Nice Musical Chairs (NMC) model represent the competition for space between groups of stakeholders of farming and herding activities in the arid Afro-Eurasia.

Socio-hydrologicalModel_version_SESMO
Marco Janssen Andres Baeza-Castro Paola Gomez Luis Bojorquez Fidel Serrano-Candela Hallie Eakin Yosune Miquelajauregui Rodrigo Garcia-Herrera | Published Tuesday, February 05, 2019We present here MEGADAPT_SESMO model. A hybrid, dynamic, spatially explicit, integrated model to simulate the vulnerability of urban coupled socio-ecological systems – in our case, the vulnerability of Mexico City to socio-hydrological risk.
Peer reviewed Coupled demographic dynamics of herd and household in pastoral systems
Mark Moritz Ian M Hamilton Andrew Yoak Abigail Buffington Chelsea E Hunter Daniel C Peart | Published Saturday, April 08, 2023This purpose of this model is to understand how the coupled demographic dynamics of herds and households constrain the growth of livestock populations in pastoral systems.
TechNet_04: Cultural Transmission in a Spatially-Situated Network
Andrew White | Published Monday, October 08, 2012 | Last modified Saturday, April 27, 2013The TechNet_04 is an abstract model that embeds a simple cultural tranmission process in an environment where interaction is structured by spatially-situated networks.
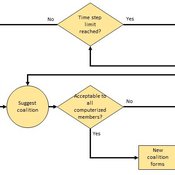
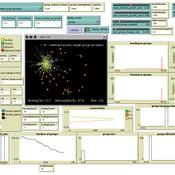
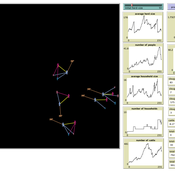
Heuristic Algorithm for Generating Strategic Coalition Structures
Andrew Collins Daniele Vernon-Bido | Published Monday, October 12, 2020The purpose of the model is to generate coalition structures of different glove games, using a specially designed algorithm. The coalition structures can be are later analyzed by comparing them to core partitions of the game used. Core partitions are coalition structures where no subset of players has an incentive to form a new coalition.
The algorithm used in this model is an advancement of the algorithm found in Collins & Frydenlund (2018). It was used used to generate the results in Vernon-Bido & Collins (2021).
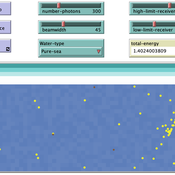
ABM for Underwater optical wireless communication in a water tank
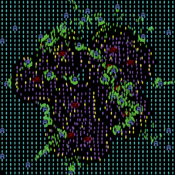
Mohamed ABID | Published Sunday, May 29, 2022This model simulates the propagation of photons in a water tank. A source of light emits an impulse of photons with equal energy represented by yellow dots. These photons are then scattered by water particles before possibly reaching the photo-detector represented by a gray line. Different types of water are considered. For each one of them we calculate the total received energy.
The water tank is represented by a blue rectangle with fixed dimensions. It’s exposed to the air interface and has totally absorbent barriers. Four types of water are supported. Each one is characterized by its absorption and scattering coefficients.
At the source, the photons are generated uniformly with a random direction within the beamwidth. Each photon travels a random distance drawn from a distribution depending on the water characteristics before encountering a water particle.
Based on the updated position of the photon, three situations may occur:
-The photon hits the barrier of the tank on its trajectory. In this case it’s considered as lost since the barriers are assumed totally absorbent.
…
Urban Teacher Lifecycle and Mobility
Yevgeny Patarakin | Published Wednesday, July 23, 2025This agent-based model simulates the lifecycle, movement, and satisfaction of teachers within an urban educational system composed of multiple universities and schools. Each teacher agent transitions through several possible roles: newcomer, university student, unemployed graduate, and employed teacher. Teachers’ pathways are shaped by spatial configuration, institutional capacities, individual characteristics, and dynamic interactions with schools and universities. Universities are assigned spatial locations with a controllable level of centralization and are characterized by academic ratings, capacity, and alumni records. Schools are distributed throughout the city, each with a limited number of vacancies, hiring requirements, and offered salaries. Teachers apply to universities based on the alignment of their personal academic profiles with institutional ratings, pursue studies, and upon graduation become candidates for employment at schools.
The employment process is driven by a decentralized matching of teacher expectations and school offers, taking into account factors such as salary, proximity, and peer similarity. Teachers’ satisfaction evolves over time, reflecting both institutional characteristics and the composition of their colleagues; low satisfaction may prompt teachers to transfer between schools within their mobility radius. Mortality and teacher attrition further shape workforce dynamics, leading to continuous recruitment of newcomers to maintain a stable population. The model tracks university reputation through the academic performance and number of alumni, and visualizes key metrics including teacher status distribution, school staffing, university alumni counts, and overall satisfaction. This structure enables the exploration of policy interventions, hiring and training strategies, and the impact of spatial and institutional design on the allocation, retention, and happiness of urban educational staff.
Displaying 10 of 175 results for "Woi Sok Oh" clear search