Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 24 results for "Kristine Belesova" clear search

GenoScope
Kristin Crouse | Published Wednesday, May 29, 2024 | Last modified Wednesday, April 09, 2025GenoScope is a modular agent-based model designed to simulate how cells respond to environmental stressors or other treatment conditions across species. Genes, treatment conditions, and cell physiology outcomes are represented as interacting agents that influence each other’s behavior over time. Rather than imposing fixed interaction rules, GenoScope initializes with randomized regulatory logic and calibrates rule sets based on empirical data. Calibration is grounded in a common-garden experiment involving 16 mammalian species—including humans, dolphins, bats, and camels—exposed to varying levels of temperature, glucose, and oxygen. This comparative approach enables the identification of mechanisms by which animal cells achieve robustness under extreme environmental conditions.
Peer reviewed B3GET
Kristin Crouse | Published Thursday, November 14, 2019 | Last modified Tuesday, September 20, 2022B3GET simulates populations of virtual organisms evolving over generations, whose evolutionary outcomes reflect the selection pressures of their environment. The model simulates several factors considered important in biology, including life history trade-offs, investment in fighting ability and aggression, sperm competition, infanticide, and competition over access to food and mates. Downloaded materials include starting genotype and population files. Edit the these files and see what changes occur in the behavior of virtual populations!
View the B3GET user manual here.
Social Identity Model of Protest Emergence (SIMPE)
Cristina Chueca Del Cerro | Published Friday, March 17, 2023The Social Identity Model of Protest Emergence (SIMPE), an agent-based model of national identity and protest mobilisations.
I developed this model for my PhD project, “Polarisation and Protest Mobilisation Around Secessionist Movements: an Agent-Based Model of Online and Offline Social Networks”, at the University of Glasgow (2019-2023).
The purpose of this model is to simulate protest emergence in a given country where there is an independence movement, fostering the self-categorisation process of national identification. In order to contextualised SIMPE, I have used Catalonia, where an ongoing secessionist movement since 2011 has been present, national identity has shown signs of polarisation, and where numerous mobilisations have taken place over the last decade. Data from the Catalan Centre of Opinion Studies (CEO) has been used to inform some of the model parameters.
…
AnimDens NetLogo
Miguel Pais Christine Ward-Paige | Published Friday, February 10, 2017 | Last modified Sunday, February 23, 2020The model demonstrates how non-instantaneous sampling techniques produce bias by overestimating the number of counted animals, when they move relative to the person counting them.
A Multi-level Multi-model of Collective Motion
Benjamin Camus Christine Bourjot Vincent Chevrier | Published Wednesday, March 25, 2015This multi-model (i.e. a model composed of interacting submodels) is a multi-level representation of a collective motion phenomenon. It was designed to study the impact of the mutual influences between individuals and groups in collective motion.
A model to explore the link between the gender-gap reversal in education and relative divorce risks
Jan Van Bavel Christine Schnor André Grow | Published Thursday, June 30, 2016 | Last modified Wednesday, September 13, 2017This model explores a social mechanism that links the reversal of the gender gap in education with changing patterns in relative divorce risks in 12 European countries.
Soil microbe-predator model with enzymes
Randall Boone John C Moore Akihiro Koyama Kirstin Holfelder | Published Thursday, November 21, 2013We seek to improve understanding of roles enzyme play in soil food webs. We created an agent-based simulation of a simple food web that includes enzymatic activity. The model was used in a publication, Moore et al. (in press; Biochemistry).
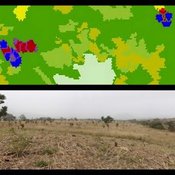
MoPAgrIB: simulating savannah landscape mosaic under shifting cultivation
Nicolas Becu Marc Deconchat Eric Garine Kouami Kokou Christine Raimond | Published Monday, May 27, 2013 | Last modified Tuesday, January 21, 2014MoPAgrIB model simulates the movement of cultivated patches in a savannah vegetation mosaic ; how they move and relocate through the landscape, depending on farming practices, population growth, social rules and vegetation growth.
Collective Decision Making for Ecological Restoration
Dean Massey Moira Zellner Cristy Watkins Jeremy Brooks Kristen Ross | Published Friday, December 30, 2011 | Last modified Friday, November 21, 2014We present an agent-based model that maps out and simulates the processes by which individuals within ecological restoration organizations communicate and collectively make restoration decisions.
Learning Extension - RAGE RAngeland Grazing Model
Nikita Strelkovskii Cristina I. Apetrei Nikolay Khabarov Valeria Javalera Rincón | Published Saturday, July 22, 2023This is an extension of the original RAGE model (Dressler et al. 2018), where we add learning capabilities to agents, specifically learning-by-doing and social learning (two processes central to adaptive (co-)management).
The extension module is applied to smallholder farmers’ decision-making - here, a pasture (patch) is the private property of the household (agent) placed on it and there is no movement of the households. Households observe the state of the pasture and their neighrbours to make decisions on how many livestock to place on their pasture every year. Three new behavioural types are created (which cannot be combined with the original ones): E-RO (baseline behaviour), E-LBD (learning-by-doing) and E-RO-SL1 (social learning). Similarly to the original model, these three types can be compared regarding long-term social-ecological performance. In addition, a global strategy switching option (corresponding to double-loop learning) allows users to study how behavioural strategies diffuse in a heterogeneous population of learning and non-learning agents.
An important modification of the original model is that extension agents are heterogeneous in how they deal with uncertainty. This is represented by an agent property, called the r-parameter (household-risk-att in the code). The r-parameter is catch-all for various factors that form an agent’s disposition to act in a certain way, such as: uncertainty in the sensing (partial observability of the resource system), noise in the information received, or an inherent characteristic of the agent, for instance, their risk attitude.
Displaying 10 of 24 results for "Kristine Belesova" clear search