Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 50 results multi-agent clear search
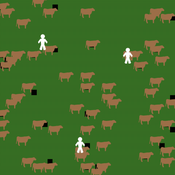
MASTOC-LLM (Multi-Agent System Tragedy of the Commons - Large Language Models)
Thomas Tuoti | Published Monday, May 18, 2026 | Last modified Tuesday, May 19, 2026MASTOC-LLM extends the classic Multi-Agent System Tragedy of the Commons (MASTOC) model by replacing hard-coded behavioral rules with autonomous decision-making powered by large language models (LLMs). Three heterogeneous agents manage herds of cows on a shared grassland commons. Each tick, an agent receives a structured prompt describing current resource levels, its own herd size, peer behavior, and — optionally — a rolling memory of recent rounds and messages from neighboring agents. The LLM returns a stocking decision (add, remove, or hold cows) together with a natural-language rationale and, when communication is enabled, a short message to broadcast to peers.
The model is designed to test whether LLM agents spontaneously develop Ostrom-style common-pool resource governance (mutual monitoring, graduated sanctions, graduated rule revision) or instead fall into identifiable failure modes. Preliminary experiments with Claude Haiku 4.5, GPT-5.4-mini, and DeepSeek R1:32b have revealed four recurring collapse patterns — Cooperative Paralysis, Defection Cascade, Overshoot-Panic, and Hybrid Architecture Failure — whose onset timing is sensitive to memory length, inter-agent communication, and the post-training alignment approach of the underlying model.
MASTOC-LLM is intended as a laboratory for generative agent-based modelling (GABM) methodology: it provides a clean, well-understood commons baseline against which LLM behavioral hypotheses can be systematically tested and compared across models, parameter sweeps, and alignment regimes.

PredPreyGrass
HBP1969 | Published Sunday, May 17, 2026Exploring learned cooperation, coevolution and free-riding. Learning is achieved through Multi-Agent Deep Reinforcement Learning (MADRL) in an ecological environment. The environment emits no other than sparse reproduction rewards. No reward shaping, no explicit cooperation signal.

Simulating Climate Stress and Social Instability: An Agent-Based Model of Ecosystem Degradation and Violence in Coastal Communities
Jacopo A. Baggio hurtado-valdivieso | Published Sunday, April 12, 2026This model is an agent-based simulation designed to explore how climate-induced environmental degradation can contribute to the emergence of social violence in coastal communities that depend heavily on ecosystem services for their livelihoods. The model represents a coupled social–ecological system in which environmental shocks—such as sea level rise and marine ecosystem decline—affect local economic conditions, food security, and community stability.
Agents in the model represent individuals whose livelihoods depend on coastal ecosystems. Environmental degradation reduces ecosystem productivity and increases economic hardship, which can lead to the formation of grievances among agents. The model incorporates behavioral thresholds that determine how individuals respond to hardship and perceived injustice. Under certain conditions—particularly when institutional capacity and law enforcement effectiveness are limited—these grievances may escalate into violent behavior.
The simulation allows users to explore how different climate scenarios, levels of ecosystem degradation, livelihood dependence, and institutional responses influence the probability of social instability and violence. By modeling the interactions between environmental stress, socio-economic vulnerability, and governance capacity, the model provides a computational framework for examining potential pathways linking climate change and conflict in coastal social–ecological systems.
…
Peer reviewed Boyds (NetLogo): Boids That Fight
Oliver M. Haynold | Published Tuesday, January 20, 2026Boyds (Boids that Fight) is an agent-based model in NetLogo that extends the classic Flocking model with multi-faction competition, a local fight–flight heuristic, and a target locking/“taking” mechanism. The model separates perception (vision) from engagement range (lock distance) and uses per-faction steering bounds to explore how local numerical superiority, sensing, and bounded turning affect victory, losses, and emergent formations.
Peer reviewed E³-MAN. An Institutionally-guided multi-agent. Model for fair and efficient negotiation.
José luis bustelo | Published Monday, September 01, 2025Negotiation plays a fundamental role in shaping human societies, underpinning conflict resolution, institutional design, and economic coordination. This article introduces E³-MAN, a novel multi-agent model for negotiation that integrates individual utility maximization with fairness and institutional legitimacy. Unlike classical approaches grounded solely in game theory, our model incorporates Bayesian opponent modeling, transfer learning from past negotiation domains, and fallback institutional rules to resolve deadlocks. Agents interact in dynamic environments characterized by strategic heterogeneity and asymmetric information, negotiating over multidimensional issues under time constraints. Through extensive simulation experiments, we compare E³-MAN against the Nash bargaining solution and equal-split baselines using key performance metrics: utilitarian efficiency, Nash social welfare, Jain fairness index, Gini coefficient, and institutional compliance. Results show that E³-MAN achieves near-optimal efficiency while significantly improving distributive equity and agreement stability. A legal application simulating multilateral labor arbitration demonstrates that institutional default rules foster more balanced outcomes and increase negotiation success rates from 58% to 98%. By combining computational intelligence with normative constraints, this work contributes to the growing field of socially aware autonomous agents. It offers a virtual laboratory for exploring how simple institutional interventions can enhance justice, cooperation, and robustness in complex socio-legal systems.
Urban Teacher Lifecycle and Mobility
Yevgeny Patarakin | Published Wednesday, July 23, 2025This agent-based model simulates the lifecycle, movement, and satisfaction of teachers within an urban educational system composed of multiple universities and schools. Each teacher agent transitions through several possible roles: newcomer, university student, unemployed graduate, and employed teacher. Teachers’ pathways are shaped by spatial configuration, institutional capacities, individual characteristics, and dynamic interactions with schools and universities. Universities are assigned spatial locations with a controllable level of centralization and are characterized by academic ratings, capacity, and alumni records. Schools are distributed throughout the city, each with a limited number of vacancies, hiring requirements, and offered salaries. Teachers apply to universities based on the alignment of their personal academic profiles with institutional ratings, pursue studies, and upon graduation become candidates for employment at schools.
The employment process is driven by a decentralized matching of teacher expectations and school offers, taking into account factors such as salary, proximity, and peer similarity. Teachers’ satisfaction evolves over time, reflecting both institutional characteristics and the composition of their colleagues; low satisfaction may prompt teachers to transfer between schools within their mobility radius. Mortality and teacher attrition further shape workforce dynamics, leading to continuous recruitment of newcomers to maintain a stable population. The model tracks university reputation through the academic performance and number of alumni, and visualizes key metrics including teacher status distribution, school staffing, university alumni counts, and overall satisfaction. This structure enables the exploration of policy interventions, hiring and training strategies, and the impact of spatial and institutional design on the allocation, retention, and happiness of urban educational staff.
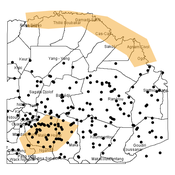
Agent-based modeling of the spatio-temporal distribution of Sahelian transhumant herds
Cheick Amed Diloma Gabriel TRAORE Etienne DELAY Alassane Bah Djibril Diop | Published Tuesday, May 20, 2025Sahelian transhumance is a seasonal pastoral mobility between the transhumant’s terroir of origin and one or more host terroirs. Sahelian transhumance can last several months and extend over hundreds of kilometers. Its purpose is to ensure efficient and inexpensive feeding of the herd’s ruminants. This paper describes an agent-based model to determine the spatio-temporal distribution of Sahelian transhumant herds and their impact on vegetation. Three scenarios based on different values of rainfall and the proportion of vegetation that can be grazed by transhumant herds are simulated. The results of the simulations show that the impact of Sahelian transhumant herds on vegetation is not significant and that rainfall does not impact the alley phase of transhumance. The beginning of the rainy season has a strong temporal impact on the spatial distribution of transhumant herds during the return phase of transhumance.
Multi-Agent Socio-Ecological Hani Terrace Model
Lei Dong Yunnan University | Published Saturday, March 29, 2025This model is to explore the changes of paddy field landscape and household livelihood structure in the village under different policy scenarios, evaluate the eco-social effects of different policies, and provide decision support tools for proposing effective and feasible policies.
Peer reviewed Environmental stochasticity, resource heterogeneity, and the evolution of cooperation
Michaela Starkey Colin Lynch Terry Hunt Carl Lipo | Published Friday, March 14, 2025 | Last modified Wednesday, July 30, 2025The emergence of cooperation in human societies is often linked to environmental constraints, yet the specific conditions that promote cooperative behavior remain an open question. This study examines how resource unpredictability and spatial dispersion influence the evolution of cooperation using an agent-based model (ABM). Our simulations test the effects of rainfall variability and resource distribution on the survival of cooperative and non-cooperative strategies. The results show that cooperation is most likely to emerge when resources are patchy, widely spaced, and rainfall is unpredictable. In these environments, non-cooperators rapidly deplete local resources and face high mortality when forced to migrate between distant patches. In contrast, cooperators—who store and share resources—can better endure extended droughts and irregular resource availability. While rainfall stochasticity alone does not directly select for cooperation, its interaction with resource patchiness and spatial constraints creates conditions where cooperative strategies provide a survival advantage. These findings offer broader insights into how environmental uncertainty shapes social organization in resource-limited settings. By integrating ecological constraints into computational modeling, this study contributes to a deeper understanding of the conditions that drive cooperation across diverse human and animal systems.
Multi-agent model of the spread of climate change denial
Kalina Maria Piskorska Martin Takáč | Published Monday, March 03, 2025This NetLogo model simulates the spread of climate change beliefs within a population of individuals. Each believer has an initial belief level, which changes over time due to interactions with other individuals and exposure to media. The aim of the model is to identify possible methods for reducing climate change denial.
Displaying 10 of 50 results multi-agent clear search