Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 192 results reviewed clear search
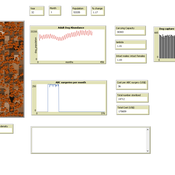
Peer reviewed DogPopDy: ABM for ABC planning
Aniruddha Belsare Abi Vanak | Published Saturday, August 01, 2020An agent-based model designed as a tool to assess and plan free-ranging dog population management programs that implement Animal Birth Control (ABC). The time, effort, financial resources and conditions needed to successfully control dog populations and achieve rabies control can be determined by performing virtual experiments using DogPopDy.
Peer reviewed Vigilant sharing in a small-scale society
Marcos Pinheiro | Published Wednesday, July 22, 2020 | Last modified Wednesday, July 29, 2020The model explores food distribution patterns that emerge in a small-scale non-agricultural group when sharing individuals engage in intentional consumption leveling with a given probability.
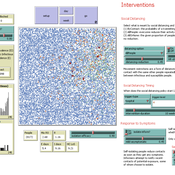
Peer reviewed JuSt-Social COVID-19
Jennifer Badham | Published Thursday, June 18, 2020 | Last modified Monday, March 29, 2021NetLogo model that allows scenarios concerning general social distancing, shielding of high-risk individuals, and informing contacts when symptomatic. Documentation includes a user manual with some simple scenarios, and technical information including descriptions of key procedures and parameter values.
Peer reviewed OfficeMoves: Personalities and Performance in an Interdependent Environment
Alan Dugger | Published Thursday, June 11, 2020After a little work experience, we realize that different kinds of people prefer different work environments: some enjoy a fast-paced challenge; some want to get by; and, others want to show off.
From that experience, we also realize that different kinds of people affect their work environments differently: some increase the pace; some slow it down; and, others make it about themselves.
This model concerns how three different kinds of people affect their work environment and how that work environment affects them in return. The model explores how this circular relation between people’s preferences and their environment creates patterns of association and performance over time.
…
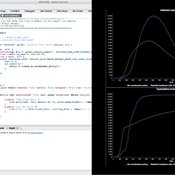
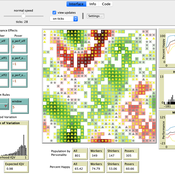
Peer reviewed COMOKIT
Patrick Taillandier Alexis Drogoul Benoit Gaudou Kevin Chapuis Nghi Huyng Quang Doanh Nguyen Ngoc Arthur Brugière Pierre Larmande Marc Choisy Damien Philippon | Published Tuesday, May 26, 2020 | Last modified Wednesday, July 01, 2020In the face of the COVID-19 pandemic, public health authorities around the world have experimented, in a short period of time, with various combinations of interventions at different scales. However, as the pandemic continues to progress, there is a growing need for tools and methodologies to quickly analyze the impact of these interventions and answer concrete questions regarding their effectiveness, range and temporality.
COMOKIT, the COVID-19 modeling kit, is such a tool. It is a computer model that allows intervention strategies to be explored in silico before their possible implementation phase. It can take into account important dimensions of policy actions, such as the heterogeneity of individual responses or the spatial aspect of containment strategies.
In COMOKIT, built using the agent-based modeling and simulation platform GAMA, the profiles, activities and interactions of people, person-to-person and environmental transmissions, individual clinical statuses, public health policies and interventions are explicitly represented and they all serve as a basis for describing the dynamics of the epidemic in a detailed and realistic representation of space.
…
Hydroman is a flexible spatially explicit model coupling human and hydrological processes to explore shallow water tables and land cover interactions in flat agricultural landscapes, modeled after the Argentine Pampas. Hydroman aligned well with established hydrological models, and was validated with water table patterns and crop yield observed in the study area.
Peer reviewed General Housing Model
J M Applegate | Published Thursday, May 07, 2020The General Housing Model demonstrates a basic housing market with bank lending, renters, owners and landlords. This model was developed as a base to which students contributed additional functions during Arizona State University’s 2020 Winter School: Agent-Based Modeling of Social-Ecological Systems.

Peer reviewed Multilevel Group Selection I
Wayne W. Wakeland Thaddeus Shannon Garry Sotnik | Published Tuesday, April 21, 2020 | Last modified Saturday, July 03, 2021New theoretical agent-based model of population-wide adoption of prosocial common-pool behavior with four parameters (initial percent of adopters, pressure to change behavior, synergy from behavior, and population density); dynamics in behavior, movement, freeriding, and group composition and size; and emergence of multilevel group selection. Theoretical analysis of model’s dynamics identified six regions in model’s parameter space, in which pressure-synergy combinations lead to different outcomes: extinction, persistence, and full adoption. Simulation results verified the theoretical analysis and demonstrated that increases in density reduce number of pressure-synergy combinations leading to population-wide adoption; initial percent of contributors affects underlying behavior and final outcomes, but not size of regions or transition zones between them; and random movement assists adoption of prosocial common-pool behavior.

Peer reviewed Emergence of Organizations out of Garbage Can Dynamics
Guido Fioretti | Published Monday, April 20, 2020 | Last modified Sunday, April 26, 2020The Garbage Can Model of Organizational Choice (GCM) is a fundamental model of organizational decision-making originally propossed by J.D. Cohen, J.G. March and J.P. Olsen in 1972. In their model, decisions are made out of random meetings of decision-makers, opportunities, solutions and problems within an organization.
With this model, these very same agents are supposed to meet in society at large where they make decisions according to GCM rules. Furthermore, under certain additional conditions decision-makers, opportunities, solutions and problems form stable organizations. In this artificial ecology organizations are born, grow and eventually vanish with time.
Peer reviewed The Garbage Can Model of Organizational Choice
Guido Fioretti | Published Monday, April 20, 2020 | Last modified Thursday, April 23, 2026The Garbage Can Model of Organizational Choice is a fundamental model of organizational decision-making originally proposed by J.D. Cohen, J.G. March and J.P. Olsen in 1972. In the 2000s, G. Fioretti and A. Lomi presented a NetLogo agent-based interpretation of this model. This code is the NetLogo 6.1.1 updated version of the Fioretti-Lomi model.
Displaying 10 of 192 results reviewed clear search