Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 201 results decision clear search
MOSAIC: Mission-Oriented Self-Organization through Auctions, Incentives, and Coalitions
Katherin Molina Lorena Holguin | Published Friday, July 31, 2026MOSAIC is an agent-based NetLogo model of decentralized mission coordination among heterogeneous robots operating under partial observability, limited energy, spatially variable risk, dynamic communication, and individual and cooperative task requirements. Robots discover tasks locally, exchange task information through temporary communication links, submit capability-, energy-, deadline-, and risk-aware bids, compete for individual contracts, and form temporary coalitions for cooperative tasks.
The model integrates decentralized auctions, greedy capability-based coalition formation, contract release and reassignment, four reward regimes, reputation, adaptive bidding strategies, failure traceability, and mission-, network-, information-, inequality-, and coalition-level metrics. It operates without a centralized mission planner or global combinatorial assignment solver.
Seven paired-seed BehaviorSpace experiments comprising 690 official simulation runs evaluate baseline mission viability, reward regimes, communication structure, capability heterogeneity, cooperative-task demand, reputation and adaptive strategies, and mission-incentive strength. The results indicate that structural coordination capacity—particularly information reach, capability compatibility, and feasible coalition construction—has a stronger effect on mission completion than increasing incentive intensity within the tested architecture and parameter ranges.
…
Oussa Pañn
Christophe Le Page Mia Reynaud | Published Thursday, July 30, 2026 | Last modified Friday, July 31, 2026The Oussa Pañn model is an agent-based representation of the social-ecological system embedded in the Oussa Pañn role-playing game. It represents shellfish harvesters making individual livelihood decisions between harvesting renewable shellfish resources from mudflats and engaging in alternative income-generating activities in a village. The model was developed to (i) compare simulated and observed game trajectories, (ii) verify the internal consistency of recorded game data, and (iii) provide a baseline against which observed player behaviour can be compared, notably through random decision-making scenarios.
Fire-WCISG
Sven Christ | Published Saturday, July 25, 2026An integrated wildfire and urban growth model for informal settlements.
Fire-WCISG is developed to test the impact of different fire management strategies on the number and type of residents staying in an informal settlement, and the fire-dependent fynbos vegetation that it is next to.
The model uses a hybrid protection motivation theory, place attachment and Turner’s informal residents as described by Christ et al. (2023) (10.1016/j.habitatint.2023.102815), for the agents decision making. Wildland vegetation is based on published understanding of fynbos ecology.
…
Amber Dilemma Zone: Driver Cognition and Signal Control in Urban Traffic
Mansoor Abdul Bari | Published Sunday, July 19, 2026This model is an extension of Wilensky’s (2003) Traffic Grid, a foundational NetLogo model of urban traffic flow. It embeds a dual-process cognitive architecture into each driver agent, transforming the original’s identical reactive units into cognitively heterogeneous individuals whose internal mental state evolves with experience; making the same intersection produce different decisions from different drivers, and different decisions from the same driver across occasions.
The core question the model addresses is the yellow-light dilemma zone: the seconds following amber onset in which a driver can neither stop safely nor clear the intersection before red. Field research documents that behavioral variance at this moment cannot be explained by geometry or legal obligation alone. This model provides the cognitive architecture that has been missing from traffic ABMs.
Each driver routes every amber-onset decision through either System 1 (fast, heuristic, automatic) or System 2 (slow, deliberative, prospect-theoretic), switching dynamically based on cognitive load, accumulated near-miss memory, and situational framing. The result is crash outcomes that are attributable, path-dependent, and sensitive to both driver disposition and signal infrastructure; none of which fixed-rule models can reproduce. Three signal control modes are included: fixed-cycle (replicating Wilensky’s original), adaptive-queue, and smart occupancy-based switching.

Agent modeling (ABM) as a tool to improve the mobility of “avoidant” birds in an ecological corridor in the localities of Chapinero, Teusaquillo, Barrios Unidos and Engativá of Bogotá city
Paula Alejandra Meza Maria Angela Echeverry-Galvis Mauricio González Méndez | Published Wednesday, June 24, 2026The purpose of this model is to analyze different configurations and scenarios of ecological corridors to simulate the movement of three avoider bird species at a local scale: Chondrohierax uncinatus (Accipitridae), a large carnivorous bird; Ampelion rubrocristatus (Cotingidae), a species that seeks areas with substantial land cover for refuge and rest; and Coeligena bonapartei (Trochilidae), a large hummingbird that prefers areas with a rich and diverse food supply. The model focusses on juvenile bird individuals seeking refuge and food, taking into account the mobility parameters of each species and the existing land cover types within the study area.
Specifically, the model aims to:
• Simulate the movement of 45 avoiders birds which are considered umbrella species sensitive to urban changes (which were chosen based on their specific biological and ecological requirements and parameters relevant to urban conservation efforts), 15 avoiders birds per specie to cross a two-dimensional world predominant urban.
• To be able to select which corridor scenario would be the most beneficial, in order to help the mobility of other species affected by urban fragmentation.
• Contribute to urban ecology research and support decision-making processes by relevant stakeholders.
An Agent-Based Model of Saving under Quasi-Hyperbolic Discounting on a Social Network.
Jose Alejandro Velazquez Monzon | Published Wednesday, June 24, 2026An agent-based model of saving and dissaving behaviour under quasi-hyperbolic (β–δ) discounting. Building on the individual decision problem of Cao and Werning (2018), the model embeds present-biased agents in a Watts–Strogatz small-world network and adds three configurable mechanisms of social influence — information diffusion, peer comparison, and social-norm conformity — across five heterogeneous behavioural profiles (Planners, Moderates, Procrastinators, Inverse Procrastinators, and Impulsive agents).
Each profile’s saving policy is approximated by value-function iteration over a discretised wealth grid; the solved policies are cached and applied as agents interact over their network neighbourhoods. The model tests whether each social mechanism can alter the saving and wealth trajectories that present-biased agents would otherwise follow in isolation, and characterises the direction and size of each effect on median wealth, wealth inequality (Gini), and the incidence of severely depleted agents.
The deposit includes the core model (Model.py), an analysis and visualisation pipeline (analyze_results.py), a standalone ODD description (ODD.md), and pinned dependencies.
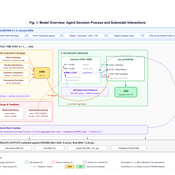
MASTOC-LLM (Multi-Agent System Tragedy of the Commons - Large Language Models)
Thomas Tuoti | Published Monday, May 18, 2026 | Last modified Tuesday, May 19, 2026MASTOC-LLM extends the classic Multi-Agent System Tragedy of the Commons (MASTOC) model by replacing hard-coded behavioral rules with autonomous decision-making powered by large language models (LLMs). Three heterogeneous agents manage herds of cows on a shared grassland commons. Each tick, an agent receives a structured prompt describing current resource levels, its own herd size, peer behavior, and — optionally — a rolling memory of recent rounds and messages from neighboring agents. The LLM returns a stocking decision (add, remove, or hold cows) together with a natural-language rationale and, when communication is enabled, a short message to broadcast to peers.
The model is designed to test whether LLM agents spontaneously develop Ostrom-style common-pool resource governance (mutual monitoring, graduated sanctions, graduated rule revision) or instead fall into identifiable failure modes. Preliminary experiments with Claude Haiku 4.5, GPT-5.4-mini, and DeepSeek R1:32b have revealed four recurring collapse patterns — Cooperative Paralysis, Defection Cascade, Overshoot-Panic, and Hybrid Architecture Failure — whose onset timing is sensitive to memory length, inter-agent communication, and the post-training alignment approach of the underlying model.
MASTOC-LLM is intended as a laboratory for generative agent-based modelling (GABM) methodology: it provides a clean, well-understood commons baseline against which LLM behavioral hypotheses can be systematically tested and compared across models, parameter sweeps, and alignment regimes.
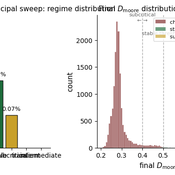
The Informational Assumptions of Schelling Segregation: An Agent-Based Decomposition of Cue Inference, Cultural Schemas, and Residential Sorting
Eric Gladstone | Published Wednesday, May 13, 2026This computational model accompanies the article “The Informational Assumptions of Schelling Segregation: An Agent-Based Decomposition of Cue Inference, Cultural Schemas, and Residential Sorting.” It implements an agent-based model in which agents infer latent neighborhood-type classes from noisy non-demographic cues through schema-specific diagnostic mappings, update beliefs, and relocate when satisfaction on a preferred latent class falls below a threshold.
The model serves as a mechanism-isolation device for studying the informational architecture underlying Schelling-style residential sorting. It includes the principal sweep configuration (14,400 runs across a seven-parameter grid), a disagreement-metric sub-sweep with permutation-minimized Jensen-Shannon divergence recorded natively, controls (positive, negative, and frozen-belief), a paired-seed cue-channel perturbation experiment, and selected-cell sensitivity sweeps for cue persistence and home-biased mobility.
The full ODD protocol, parameter manifests, deterministic seed schedules, processed outputs, regenerable figure scripts, the verification test suite, and the satisfaction-mapping audit document are included. Every reported run is deterministic given a (config, seed) pair, and an included audit script verifies bit-for-bit replay on sampled runs.
Peer reviewed Kenya ITN Agent-Based Microsimulation (2003–2024)
Wooyoung Kim Hosang Shin | Published Saturday, April 18, 2026 | Last modified Tuesday, June 16, 2026An agent-based microsimulation of insecticide-treated net (ITN) distribution and adoption in Kenya (2003–2024), integrating the Theory of Planned Behaviour, Rogers diffusion, Weibull net decay, and a GPS-based two-layer social network. 8,561 household agents calibrated via Approximate Bayesian Computation to six DHS/MIS survey waves, achieving 2.42 pp mean absolute error on Kenya-level ownership. The analysis chain supports mechanism counterfactuals and policy experiments on equity outcomes of ITN distribution strategies.
Exploring the aftermath of transition failures: An agent-based model
Gangmin Park Junmin Lee Jisoo Lee Keungoui Kim | Published Friday, March 06, 2026This computational model is an agent-based model (ABM) developed to investigate how repeated failures of emerging niches accumulate and influence the trajectory of socio-technical transitions. Built in AnyLogic 8.7.11, the model simulates the dynamic interactions between a dominant regime and sequential niche entrants within a two-dimensional practice space. It models alignment, movement, and competition based on technological maturity and market penetration. The model utilizes a reinforcing feedback structure linking consumer support, output, resource accumulation, and capacity development (Physical and Institutional Capacity). A complete model specification following the ODD+D (Overview, Design concepts, Details, and Decision) protocol is included in the documentation.
Displaying 10 of 201 results decision clear search