About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 32 results complex systems clear search

LogoClim: WorldClim in NetLogo
Leandro Garcia Daniel Vartanian Aline Martins de Carvalho Aline | Published Thursday, July 03, 2025 | Last modified Thursday, July 03, 2025LogoClim is a NetLogo model for simulating and visualizing global climate conditions. It allows researchers to integrate high-resolution climate data into agent-based models, supporting reproducible research in ecology, agriculture, environmental science, and other fields that rely on climate data integration.
The model utilizes raster data to represent climate variables such as temperature and precipitation over time. It incorporates historical data (1951-2024) and future climate projections (2021-2100) derived from global climate models under various Shared Socioeconomic Pathways (SSPs) (O’Neill et al., 2017). All climate inputs come from WorldClim 2.1, a widely used source of high-resolution, interpolated climate datasets based on weather station observations worldwide (Fick & Hijmans, 2017), available for academic and other non-commercial use.
LogoClim follows the FAIR Principles for Research Software (Barker et al., 2022) and is openly available on the CoMSES Network and GitHub.
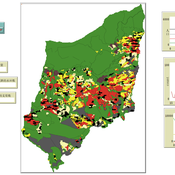
Multi-Agent Socio-Ecological Hani Terrace Model
Lei Dong Yunnan University | Published Saturday, March 29, 2025This model is to explore the changes of paddy field landscape and household livelihood structure in the village under different policy scenarios, evaluate the eco-social effects of different policies, and provide decision support tools for proposing effective and feasible policies.
Retention in Higher Education: An Agent-Based Model of Social Interactions and Motivated Agent Behavior
Andrew Crooks Amira Al-Khulaidy Stine | Published Wednesday, October 23, 2024Educational attainment and student retention in higher education are two of the main focuses of higher education research. Institutions in the U.S. are constantly looking for ways to identify areas of improvement across different aspects of the student experience on university campuses. This paper combines Department of Education data, U.S. Census data, and higher education theory on student retention, to build an agent-based model of student behavior.
Simple models with different types of complexity
Michael Roos | Published Tuesday, September 17, 2024 | Last modified Saturday, March 01, 2025Hierarchical problem-solving model
The model simulates a hierarchical problem-solving process in which a manager delegates parts of a problem to specialists, who attempt to solve specific aspects based on their unique skills. The goal is to examine how effectively the hierarchical structure works in solving the problem, the total cost of the process, and the resulting solution quality.
Problem-solving random network model
The model simulates a network of agents (generalists) who collaboratively solve a fixed problem by iterating over it and using their individual skills to reduce the problem’s complexity. The goal is to study the dynamics of the problem-solving process, including agent interactions, work cycles, total cost, and solution quality.
Peer reviewed Behavior changes through influence
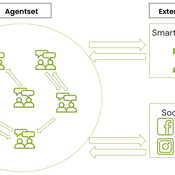
Daria Soboleva | Published Friday, August 30, 2024The model is designed to simulate the behavior and decision-making processes of individuals (agents) in a social network. It aims to represent the changes in individual probability to take any action based on changes in attributes. The action is anything that can be reasonably influenced by the three influencing methods implemented in this model: peer pressure, social media, and state campaigns, and for which the user has a decision-making model. The model is implemented in the multi-agent programmable environment NetLogo 6.3.0.
epiworldR Type: Fast Agent-Based Epi Models
George G. Vega Yon Derek Meyer | Published Monday, August 26, 2024A flexible framework for Agent-Based Models (ABM), the ‘epiworldR’ package provides methods for prototyping disease outbreaks and transmission models using a ‘C++’ backend, making it very fast. It supports multiple epidemiological models, including the Susceptible-Infected-Susceptible (SIS), Susceptible-Infected-Removed (SIR), Susceptible-Exposed-Infected-Removed (SEIR), and others, involving arbitrary mitigation policies and multiple-disease models. Users can specify infectiousness/susceptibility rates as a function of agents’ features, providing great complexity for the model dynamics. Furthermore, ‘epiworldR’ is ideal for simulation studies featuring large populations.
Peer reviewed Agent-Based Insight into Eco-Choices: Simulating the Fast Fashion Shift
Daria Soboleva Angel Sánchez | Published Wednesday, August 07, 2024 | Last modified Wednesday, June 11, 2025The present model was created and used for the study titled ``Agent-Based Insight into Eco-Choices: Simulating the Fast Fashion Shift.” The model is implemented in the multi-agent programmable environment NetLogo 6.3.0. The model is designed to simulate the behavior and decision-making processes of individuals (agents) in a social network. It focuses on how agents interact with their peers, social media, and government campaigns, specifically regarding their likelihood to purchase fast fashion.
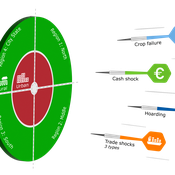
DARTS: modelling effects of shocks on global, regional, urban and rural food security
Geerten Hengeveld Hubert Fonteijn Pepijn van Oort | Published Tuesday, June 18, 2024Food trade networks represent a complex system where food is periodically produced in different regions of the world. Food is continuously stocked and traded. Food security in a globalised world is vulnerable to shocks. We present DARTS, a new agent based model that models monthly dynamics of food production, trade, stocking, consumption and food security for different interconnected world regions and a city state. Agents in different regions differ in their harvest seasons, wealth (rich and poor), degree of urbanisation and connection to domestic and global markets. DARTS was specifically designed to model direct and indirect effects of shocks in the food system. We introduce a new typology of 6 distinct shock types and analyse their impact on food security, modelling local and global effects and short term and longer term effects. An second important scientific novelty of the model is that DARTS can also model indirect effects of shocks (cascading in space and in time, lag effects due to trade and food stock buffering). A third important scientific novelty of the model is its’ capability of modelling food security at different scales, in which the rural/urban divide and differences in (intra-annually varying) production and trade connections play a key role. At the time of writing DARTS is yet insufficiently parameterised for accurate prediction for real world regions and cities. Simulations for a hypothetical in silico world with 3 regions and a city state show that DARTS can reproduce rich and complex dynamics with analogues in the real world. The scientific interest is more on deepening insight in process dynamics and chains of events that lead to ultimate shock effects on food security.

Knowledge Sharing in a Hospital
bpint Emily Molfino Joshua Goldstein Kathryn Schaefer Ziemer Mark Orr Bryan Lewis Jose Jimenez | Published Friday, January 27, 2023Organizations are complex systems comprised of many dynamic and evolving interaction patterns among individuals and groups. Understanding these interactions and how patterns, such as informal structures and knowledge sharing behavior, emerge are crucial to creating effective and efficient organizations. To explore such organizational dynamics, the agent-based model integrates a cognitive model, dynamic social networks, and a physical environment.
Peer reviewed Infectious diseases model for mixed-methods research chapter
Mark Moritz Ian M Hamilton Chelsea E Hunter Daniel C Peart | Published Sunday, January 30, 2022The purpose of this curricular model is to teach students the basics of modeling complex systems using agent-based modeling. It is a simple SIR model that simulates how a disease spreads through a population as its members change from susceptible to infected to recovered and then back to susceptible. The dynamics of the model are such that there are multiple emergent outcomes depending on the parameter settings, initial conditions, and chance.
The curricular model can be used with the chapter Agent-Based Modeling in Mixed Methods Research (Moritz et al. 2022) in the Handbook of Teaching Qualitative & Mixed Methods (Ruth et al. 2022).
The instructional videos can be accessed on YouTube: Video 1 (https://youtu.be/32_JIfBodWs); Video 2 (https://youtu.be/0PK_zVKNcp8); and Video 3 (https://youtu.be/0bT0_mYSAJ8).
Displaying 10 of 32 results complex systems clear search