Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1229 results for "Lee-Ann Sutherland" clear search
The fourth and final extension to the standard Adder model to replicate the various interventions typically associated with Transition Experiments.
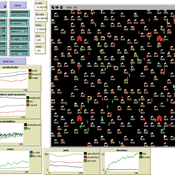
Urban Dynamics
Hideyuki Nagai | Published Monday, November 11, 2019This is an urban dynamics ABM of abstraction of a city and residents’ activities there.
It allows you to evaluate the effects of urban policies, such as an introduction of an open facility for residents with pedestrian-friendly accommodations, promotion of bicycle use, and control of private automobile use in an urban central area, in controlling urban sprawl.
On July 20th, James Holmes committed a mass shooting in a midnight showing of The Dark Knight Rises. The Aurora Colorado shooting was used as a test case to validate this framework for modeling mass shootings.
ABSAM model
Marcin Wozniak | Published Monday, August 29, 2016 | Last modified Tuesday, November 08, 2016ABSAM model is an agent-based search and matching model of the local labor market. There are four types of agents in the economy, which cooperate in the artificial world, where behavioral rules were extracted from the labor market search theory.
Selective Depolarization by Endogenous Migration in Attraction-Repulsion Opinion Dynamics (NetLogo)
poyeker | Published Tuesday, February 17, 2026This model implements a coupled opinion-mobility agent-based framework in NetLogo, extending Attraction-Repulsion Model (ARM) dynamics with endogenous migration in continuous 2D space.
Each agent has an opinion s in [0,1] and a spatial position (x,y). Agents interact locally within an interaction radius, with exposure-controlled interaction probability. Opinion updates follow ARM rules: attraction for small opinion distance and repulsion for large distance (tolerance threshold T). After social interaction, agents move according to a social-force mechanism that balances attraction to similar neighbors and avoidance of dissimilar neighbors, controlled by orientation bias (approaching goods vs leaving bads). The model also includes an optional exposure-mobility coupling setting.
Main outputs include polarization (P), spatial assortativity (Moran’s I), mixed-neighbor fraction (f_mix), and good-component count (N_g). The model is designed to study phase behavior of polarization and segregation under mobility and tolerance heterogeneity.
…
A simple Multi-Agent System of the Tragedy Of the Commons (MASTOC-s)
Julia Schindler | Published Friday, June 29, 2012 | Last modified Saturday, April 27, 2013This is a simple model replicating Hardin’s Tragedy of the Commons using reactive agents that have psychological behavioral and social preferences.
Evolution of Conditional Cooperation
M Manning Marco Janssen Oyita Udiani | Published Thursday, August 01, 2013 | Last modified Friday, May 13, 2022Cultural group selection model used to evaluate the conditions for agents to evolve who have other-regarding preferences in making decisions in public good games.
A Multi-level Multi-model of Collective Motion
Benjamin Camus Christine Bourjot Vincent Chevrier | Published Wednesday, March 25, 2015This multi-model (i.e. a model composed of interacting submodels) is a multi-level representation of a collective motion phenomenon. It was designed to study the impact of the mutual influences between individuals and groups in collective motion.
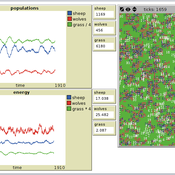
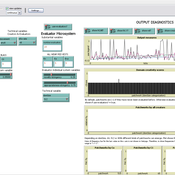
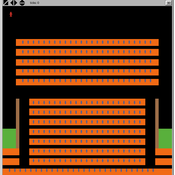
Peer reviewed PPHPC - Predator-Prey for High-Performance Computing
Nuno Fachada | Published Saturday, August 08, 2015 | Last modified Wednesday, November 25, 2015PPHPC is a conceptual model for studying and evaluating implementation strategies for spatial agent-based models (SABMs). It is a realization of a predator-prey dynamic system, and captures important SABMs characteristics.
Displaying 10 of 1229 results for "Lee-Ann Sutherland" clear search