Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1221 results for "Ian M Hamilton" clear search
Learning Extension - RAGE RAngeland Grazing Model
Nikita Strelkovskii Cristina I. Apetrei Nikolay Khabarov Valeria Javalera Rincón | Published Saturday, July 22, 2023This is an extension of the original RAGE model (Dressler et al. 2018), where we add learning capabilities to agents, specifically learning-by-doing and social learning (two processes central to adaptive (co-)management).
The extension module is applied to smallholder farmers’ decision-making - here, a pasture (patch) is the private property of the household (agent) placed on it and there is no movement of the households. Households observe the state of the pasture and their neighrbours to make decisions on how many livestock to place on their pasture every year. Three new behavioural types are created (which cannot be combined with the original ones): E-RO (baseline behaviour), E-LBD (learning-by-doing) and E-RO-SL1 (social learning). Similarly to the original model, these three types can be compared regarding long-term social-ecological performance. In addition, a global strategy switching option (corresponding to double-loop learning) allows users to study how behavioural strategies diffuse in a heterogeneous population of learning and non-learning agents.
An important modification of the original model is that extension agents are heterogeneous in how they deal with uncertainty. This is represented by an agent property, called the r-parameter (household-risk-att in the code). The r-parameter is catch-all for various factors that form an agent’s disposition to act in a certain way, such as: uncertainty in the sensing (partial observability of the resource system), noise in the information received, or an inherent characteristic of the agent, for instance, their risk attitude.
Sensitivity of a population submitted to floods to unknown upcoming floods and parameters of the dynamics
Sylvie Huet | Published Wednesday, September 22, 2021This work is a java implementation of a study of the viability of a population submitted to floods. The population derives some benefit from living in a certain environment. However, in this environment, floods can occur and cause damage. An individual protection measure can be adopted by those who wish and have the means to do so. The protection measure reduces the damage in case of a flood. However, the effectiveness of this measure deteriorates over time. Individual motivation to adopt this measure is boosted by the occurrence of a flood. Moreover, the public authorities can encourage the population to adopt this measure by carrying out information campaigns, but this comes at a cost. People’s decisions are modelled based on the Protection Motivation Theory (Rogers1975, Rogers 1997, Maddux1983) arguing that the motivation to protect themselves depends on their perception of risk, their capacity to cope with risk and their socio-demographic characteristics.
While the control designing proper informations campaigns to remain viable every time is computed in the work presented in https://www.comses.net/codebases/e5c17b1f-0121-4461-9ae2-919b6fe27cc4/releases/1.0.0/, the aim of the present work is to produce maps of probable viability in case the serie of upcoming floods is unknown as well as much of the parameters for the population dynamics. These maps are bi-dimensional, based on the value of known parameters: the current average wealth of the population and their actual or possible future annual revenues.
Style_Net_01
Andrew White | Published Tuesday, August 03, 2021Style_Net_01 is a spatial agent-based model designed to serve as a platform for exploring geographic patterns of tool transport and discard among seasonally mobile hunter-gatherer populations. The model has four main levels: artifact, person, group, and system. Persons make, use, and discard artifacts. Persons travel in groups within the geographic space of the model. The movements of groups represent a seasonal pattern of aggregation and dispersal, with all groups coalescing at an aggregation site during one point of the yearly cycle. The scale of group mobility is controlled by a parameter. The creation, use, and discard of artifacts is controlled by several parameters that specify how many tools each person carries in a personal inventory, how many times each tool can be used before it is discarded, and the frequency of tool usage. A lithic source (representing a geographically-specific, recognizable source of stone for tools) can be placed anywhere in the geographic space of the model.
Peer reviewed AgModel
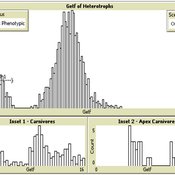
Isaac Ullah | Published Friday, December 06, 2024AgModel is an agent-based model of the forager-farmer transition. The model consists of a single software agent that, conceptually, can be thought of as a single hunter-gather community (i.e., a co-residential group that shares in subsistence activities and decision making). The agent has several characteristics, including a population of human foragers, intrinsic birth and death rates, an annual total energy need, and an available amount of foraging labor. The model assumes a central-place foraging strategy in a fixed territory for a two-resource economy: cereal grains and prey animals. The territory has a fixed number of patches, and a starting number of prey. While the model is not spatially explicit, it does assume some spatiality of resources by including search times.
Demographic and environmental components of the simulation occur and are updated at an annual temporal resolution, but foraging decisions are “event” based so that many such decisions will be made in each year. Thus, each new year, the foraging agent must undertake a series of optimal foraging decisions based on its current knowledge of the availability of cereals and prey animals. Other resources are not accounted for in the model directly, but can be assumed for by adjusting the total number of required annual energy intake that the foraging agent uses to calculate its cereal and prey animal foraging decisions. The agent proceeds to balance the net benefits of the chance of finding, processing, and consuming a prey animal, versus that of finding a cereal patch, and processing and consuming that cereal. These decisions continue until the annual kcal target is reached (balanced on the current human population). If the agent consumes all available resources in a given year, it may “starve”. Starvation will affect birth and death rates, as will foraging success, and so the population will increase or decrease according to a probabilistic function (perturbed by some stochasticity) and the agent’s foraging success or failure. The agent is also constrained by labor caps, set by the modeler at model initialization. If the agent expends its yearly budget of person-hours for hunting or foraging, then the agent can no longer do those activities that year, and it may starve.
Foragers choose to either expend their annual labor budget either hunting prey animals or harvesting cereal patches. If the agent chooses to harvest prey animals, they will expend energy searching for and processing prey animals. prey animals search times are density dependent, and the number of prey animals per encounter and handling times can be altered in the model parameterization (e.g. to increase the payoff per encounter). Prey animal populations are also subject to intrinsic birth and death rates with the addition of additional deaths caused by human predation. A small amount of prey animals may “migrate” into the territory each year. This prevents prey animals populations from complete decimation, but also may be used to model increased distances of logistic mobility (or, perhaps, even residential mobility within a larger territory).
…
Multi-level model of attitudinal dynamics
Ingo Wolf | Published Wednesday, April 06, 2016 | Last modified Wednesday, May 04, 2016A model of attitudinal dynamics based on the cognitive mechanism of emotional coherence. The code is written in Java. For initialization an additional dataset is required.
02 OamLab V1.10 - Open Atwood Machine Laboratory
Garvin Boyle | Published Saturday, January 31, 2015 | Last modified Thursday, April 13, 2017Using chains of replicas of Atwood’s Machine, this model explores implications of the Maximum Power Principle. It is one of a series of models exploring the dynamics of sustainable economics – PSoup, ModEco, EiLab, OamLab, MppLab, TpLab, EiLab.
03 MppLab V1.09 – Maximum Power Principle Laboratory
Garvin Boyle | Published Saturday, April 15, 2017Using webs of replicas of Atwood’s Machine, we explore implications of the Maximum Power Principle. This is one of a series of models exploring the dynamics of sustainable economics – PSoup, ModEco, EiLab, OamLab, MppLab, TpLab, CmLab.
How does the world population adapt its policies on energy when it is confronted with a climate change? This model combines a climate-economy model with adaptive agents.
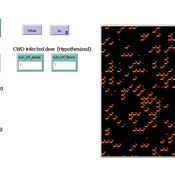
Peer reviewed CapOvCWD
Aniruddha Belsare | Published Tuesday, September 09, 2025 | Last modified Tuesday, November 11, 2025CapOvCWD is an agent-based model that simulates a captive cervid herd composed of adults and fawns. The model deer population is initialized using data on herd size and composition from captive facility records. Individual deer domiciliary history and annual CWD testing records inform the herd size and sample size (for CWD testing), respectively. The model can be used to iteratively estimate the facility level annual CWD detection probability. Detection probability estimates can be further refined by incorporating multiyear CWD testing data. This approach can be particularly useful for interpreting negative test results from a subset of the captive herd. Facility level detection probability estimates provide a comprehensive and standardized risk metric that reflects the likelihood of undetected CWD in the facility.
Peer reviewed DogFoxCDVspillover
Aniruddha Belsare Matthew Gompper | Published Thursday, March 16, 2017 | Last modified Tuesday, April 04, 2017The purpose of this model is to better understand the dynamics of a multihost pathogen in two host system comprising of high densities of domestic hosts and sympatric wildlife hosts susceptible to the pathogen.
Displaying 10 of 1221 results for "Ian M Hamilton" clear search