Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 51 results ecology clear search
Fire-WCISG
Sven Christ | Published Saturday, July 25, 2026An integrated wildfire and urban growth model for informal settlements.
Fire-WCISG is developed to test the impact of different fire management strategies on the number and type of residents staying in an informal settlement, and the fire-dependent fynbos vegetation that it is next to.
The model uses a hybrid protection motivation theory, place attachment and Turner’s informal residents as described by Christ et al. (2023) (10.1016/j.habitatint.2023.102815), for the agents decision making. Wildland vegetation is based on published understanding of fynbos ecology.
…

Agent modeling (ABM) as a tool to improve the mobility of “avoidant” birds in an ecological corridor in the localities of Chapinero, Teusaquillo, Barrios Unidos and Engativá of Bogotá city
Paula Alejandra Meza Maria Angela Echeverry-Galvis Mauricio González Méndez | Published Wednesday, June 24, 2026The purpose of this model is to analyze different configurations and scenarios of ecological corridors to simulate the movement of three avoider bird species at a local scale: Chondrohierax uncinatus (Accipitridae), a large carnivorous bird; Ampelion rubrocristatus (Cotingidae), a species that seeks areas with substantial land cover for refuge and rest; and Coeligena bonapartei (Trochilidae), a large hummingbird that prefers areas with a rich and diverse food supply. The model focusses on juvenile bird individuals seeking refuge and food, taking into account the mobility parameters of each species and the existing land cover types within the study area.
Specifically, the model aims to:
• Simulate the movement of 45 avoiders birds which are considered umbrella species sensitive to urban changes (which were chosen based on their specific biological and ecological requirements and parameters relevant to urban conservation efforts), 15 avoiders birds per specie to cross a two-dimensional world predominant urban.
• To be able to select which corridor scenario would be the most beneficial, in order to help the mobility of other species affected by urban fragmentation.
• Contribute to urban ecology research and support decision-making processes by relevant stakeholders.
Peer reviewed Kenya ITN Agent-Based Microsimulation (2003–2024)
Wooyoung Kim Hosang Shin | Published Saturday, April 18, 2026 | Last modified Tuesday, June 16, 2026An agent-based microsimulation of insecticide-treated net (ITN) distribution and adoption in Kenya (2003–2024), integrating the Theory of Planned Behaviour, Rogers diffusion, Weibull net decay, and a GPS-based two-layer social network. 8,561 household agents calibrated via Approximate Bayesian Computation to six DHS/MIS survey waves, achieving 2.42 pp mean absolute error on Kenya-level ownership. The analysis chain supports mechanism counterfactuals and policy experiments on equity outcomes of ITN distribution strategies.

Simulating Climate Stress and Social Instability: An Agent-Based Model of Ecosystem Degradation and Violence in Coastal Communities
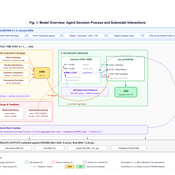
Jacopo A. Baggio hurtado-valdivieso | Published Sunday, April 12, 2026This model is an agent-based simulation designed to explore how climate-induced environmental degradation can contribute to the emergence of social violence in coastal communities that depend heavily on ecosystem services for their livelihoods. The model represents a coupled social–ecological system in which environmental shocks—such as sea level rise and marine ecosystem decline—affect local economic conditions, food security, and community stability.
Agents in the model represent individuals whose livelihoods depend on coastal ecosystems. Environmental degradation reduces ecosystem productivity and increases economic hardship, which can lead to the formation of grievances among agents. The model incorporates behavioral thresholds that determine how individuals respond to hardship and perceived injustice. Under certain conditions—particularly when institutional capacity and law enforcement effectiveness are limited—these grievances may escalate into violent behavior.
The simulation allows users to explore how different climate scenarios, levels of ecosystem degradation, livelihood dependence, and institutional responses influence the probability of social instability and violence. By modeling the interactions between environmental stress, socio-economic vulnerability, and governance capacity, the model provides a computational framework for examining potential pathways linking climate change and conflict in coastal social–ecological systems.
…
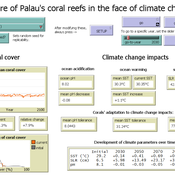
Development of coral reefs under climate change impacts and adaptation options
Nina Preußler | Published Friday, May 30, 2025This NetLogo model simulates how coral reefs around the islands of Palau would develop under different emission scenarios and with selected adaptation strategies. Reef health is indicated by coral cover (%) and is affected by four major climate change impacts: increasing sea surface temperature, sea level rise, ocean acidification, and more intense typhoons. The model differentiates between inner and outer reefs, with the former naturally adapted to warmer, more acidic waters. The simulation includes bleaching events and possible recovery. In addition, the user can choose between different coral transplantation strategies as well as regulate natural thermal adaptation rates.
Construction and Demolition model to track material flows and embodied carbon
Jonathan Edgardo Cohen | Published Monday, September 30, 2024Reusing existing material stocks in developed built environments can significantly reduce the environmental footprint of the construction and demolition sector. However, material reuse in urban areas presents technical, temporal, and geographical challenges. Although a better understanding of spatial and temporal changes in material stocks could improve city resource management, limited scientific contributions have addressed this challenge.
This study details the steps followed in developing a spatially explicit rule-based simulation of materials stock. The simulation provides a proof of concept by incorporating the spatial and temporal dimensions of construction and demolition activities to analyse how various urban parameters determine material flows and embodied carbon in urban areas. The model explores the effects of 1) re-using recycled materials, 2) demolitions, 3) renovations and 4) various building typologies.
To showcase the model’s capabilities, the residential building stock of Gothenburg City is used as a case study, and eight building materials are tracked. Environmental impacts (A1-A3) are calculated with embodied carbon factors. The main parameters are explored in a baseline scenario. Then, a second scenario focuses on a hypothetical policy that promotes improvements in building energy performance.
The simulation can be expanded to include more materials and built environment assets and allows for future explorations on, for example, the role of logistics, the implementation of recycling or reuse stations, and, in general, supporting sustainable and circular strategies from the construction sector.
Foragers to Farmers
Nick Gauthier Elske van der Vaart Michael Storozum Tim Dorscheidt | Published Monday, July 22, 2024This model is represents an effort to replicate one of the first attempts (van der Vaart 2006) to develop an agent based model of agricultural origins using principles and equations drawn from human behavioral ecology. We have taken one theory of habitat choice (Ideal Free Distribution) and applied it to human behavioral adaptations to differences in resource quality of different habitats.
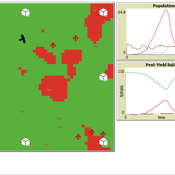
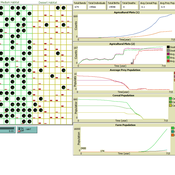
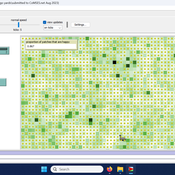
Peer reviewed Avian pest control: Yield outcome due to insectivorous birds, falconry, and integration of nest boxes.
David Jung | Published Monday, November 13, 2023 | Last modified Sunday, November 19, 2023The model aims to simulate predator-prey relationships in an agricultural setting. The focus lies on avian communities and their effect on different pest organisms (here: pest birds, rodents, and arthropod pests). Since most case studies focused on the impact on arthropod pests (AP) alone, this model attempts to include effects on yield outcome. By incorporating three treatments with different factor levels (insectivorous bird species, falconry, nest box density) an experimental setup is given that allows for further statistical analysis to identify an optimal combination of the treatments.
In light of a global decline of birds, insects, and many other groups of organisms, alternative practices of pest management are heavily needed to reduce the input of pesticides. Avian pest control therefore poses an opportunity to bridge the disconnect between humans and nature by realizing ecosystem services and emphasizing sustainable social ecological systems.
Peer reviewed Yards
srailsback Emily Minor Soraida Garcia Philip Johnson | Published Thursday, November 02, 2023This is a model of plant communities in urban and suburban residential neighborhoods. These plant communities are of interest because they provide many benefits to human residents and also provide habitat for wildlife such as birds and pollinators. The model was designed to explore the social factors that create spatial patterns in biodiversity in yards and gardens. In particular, the model was originally developed to determine whether mimicry behaviors–-or neighbors copying each other’s yard design–-could produce observed spatial patterns in vegetation. Plant nurseries and socio-economic constraints were also added to the model as other potential sources of spatial patterns in plant communities.
The idea for the model was inspired by empirical patterns of spatial autocorrelation that have been observed in yard vegetation in Chicago, Illinois (USA), and other cities, where yards that are closer together are more similar than yards that are farther apart. The idea is further supported by literature that shows that people want their yards to fit into their neighborhood. Currently, the yard attribute of interest is the number of plant species, or species richness. Residents compare the richness of their yards to the richness of their neighbors’ yards. If a resident’s yard is too different from their neighbors, the resident will be unhappy and change their yard to make it more similar.
The model outputs information about the diversity and identity of plant species in each yard. This can be analyzed to look for spatial autocorrelation patterns in yard diversity and to explore relationships between mimicry behaviors, yard diversity, and larger scale diversity.
Correlated random walk (Javascript)
Viktoriia Radchuk Uta Berger Thibault Fronville | Published Tuesday, May 09, 2023The first simple movement models used unbiased and uncorrelated random walks (RW). In such models of movement, the direction of the movement is totally independent of the previous movement direction. In other words, at each time step the direction, in which an individual is moving is completely random. This process is referred to as a Brownian motion.
On the other hand, in correlated random walks (CRW) the choice of the movement directions depends on the direction of the previous movement. At each time step, the movement direction has a tendency to point in the same direction as the previous one. This movement model fits well observational movement data for many animal species.
The presented agent based model simulated the movement of the agents as a correlated random walk (CRW). The turning angle at each time step follows the Von Mises distribution with a ϰ of 10. The closer ϰ gets to zero, the closer the Von Mises distribution becomes uniform. The larger ϰ gets, the more the Von Mises distribution approaches a normal distribution concentrated around the mean (0°).
In this script the turning angles (following the Von Mises distribution) are generated based on the the instructions from N. I. Fisher 2011.
This model is implemented in Javascript and can be used as a building block for more complex agent based models that would rely on describing the movement of individuals with CRW.
Displaying 10 of 51 results ecology clear search