Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 72 results space clear search
Political Competition
Marco Janssen | Published Sunday, June 28, 2026Political parties compete for voters by (re-) positioning themselves within the opinion space.
From Boundary Crossings to Global Connectivity: A Minimal Mechanism in Structured Agent-Based Landscapes
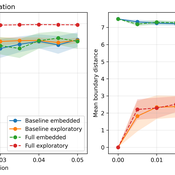
Fabio Nelli | Published Sunday, May 17, 2026This repository contains the Python implementation of an agent-based model investigating how localized boundary-crossing dynamics generate large-scale connectivity in structured multi-attractor landscapes.
Agents evolve in a continuous two-dimensional environment composed of attractor basins. A fraction of agents exhibits exploratory higher-mobility dynamics, while the remaining agents remain locally constrained. The model analyzes how localized configurational transitions accumulate into transition networks that progressively integrate the explored state space.
The repository includes:
…
Peer reviewed Integrating Reinforcement Learning in Agent-Based Modeling for Dynamic Investment Decisions
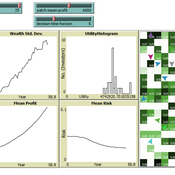
Muhammad Khurram Ali Haider Ali Hafiz Mohammad | Published Tuesday, May 05, 2026This model is a part of an ongoing research project on Multiagent Reinforcement Learning (MARL). The ODD protocol is included in the model. In this version of the model, Proximal Policy Optimization (PPO) is designed in the agent behaviors. It also includes a designed experiment in its Behavior Space which is used in the Response Surface Methodology and training of an Artificial Neural Network (ANN) based Recommender System.
Exploring the aftermath of transition failures: An agent-based model
Gangmin Park Junmin Lee Jisoo Lee Keungoui Kim | Published Friday, March 06, 2026This computational model is an agent-based model (ABM) developed to investigate how repeated failures of emerging niches accumulate and influence the trajectory of socio-technical transitions. Built in AnyLogic 8.7.11, the model simulates the dynamic interactions between a dominant regime and sequential niche entrants within a two-dimensional practice space. It models alignment, movement, and competition based on technological maturity and market penetration. The model utilizes a reinforcing feedback structure linking consumer support, output, resource accumulation, and capacity development (Physical and Institutional Capacity). A complete model specification following the ODD+D (Overview, Design concepts, Details, and Decision) protocol is included in the documentation.
Selective Depolarization by Endogenous Migration in Attraction-Repulsion Opinion Dynamics (NetLogo)
poyeker | Published Tuesday, February 17, 2026This model implements a coupled opinion-mobility agent-based framework in NetLogo, extending Attraction-Repulsion Model (ARM) dynamics with endogenous migration in continuous 2D space.
Each agent has an opinion s in [0,1] and a spatial position (x,y). Agents interact locally within an interaction radius, with exposure-controlled interaction probability. Opinion updates follow ARM rules: attraction for small opinion distance and repulsion for large distance (tolerance threshold T). After social interaction, agents move according to a social-force mechanism that balances attraction to similar neighbors and avoidance of dissimilar neighbors, controlled by orientation bias (approaching goods vs leaving bads). The model also includes an optional exposure-mobility coupling setting.
Main outputs include polarization (P), spatial assortativity (Moran’s I), mixed-neighbor fraction (f_mix), and good-component count (N_g). The model is designed to study phase behavior of polarization and segregation under mobility and tolerance heterogeneity.
…
An agent-based model of the journey of victim/survivors through local authority domestic abuse support services in the UK
Bruce Edmonds | Published Monday, July 28, 2025This model played a small part in the UK government’s review of the working of local authority implementation of the Domestic Abuse legislation. The model explicitly represents victim-survivor families as they: (a) try to contact the local DA support system, (b) are triaged by the system and (if there is space) allocated to safe temporary accomodation (c) recieve support services from this position and (d) eventually move on to more permenant accomodation. The purpose of the model was to understand some possible ways in which the implementation of DA Duty, might be frustrated in practice, the identification of gaps in the evidence base and to inform the developing Theory of Change. The key measures used for assessing outcomes in the model were the number of families helped and the services that were delivered to them. The exploration was grounded for in two archetypal cases: that of a relatively immature system for the delivery of DA services and a more mature one (based on actual local authority cases, but not based on any single one). See the official report under associated publications for a summary of results.
Peer reviewed soslivestock model
Marco Janssen Irene Perez Ibarra Diego J. Soler-Navarro Alicia Tenza Peral | Published Wednesday, May 28, 2025 | Last modified Tuesday, June 10, 2025The purpose of this model is to analyze how different management strategies affect the wellbeing, sustainability and resilience of an extensive livestock system under scenarios of climate change and landscape configurations. For this purpose, it simulates one cattle farming system, in which agents (cattle) move through the space using resources (grass). Three farmer profiles are considered: 1) a subsistence farmer that emphasizes self-sufficiency and low costs with limited attention to herd management practices, 2) a commercial farmer focused on profit maximization through efficient production methods, and 3) an environmental farmer that prioritizes conservation of natural resources and animal welfare over profit maximization. These three farmer profiles share the same management strategies to adapt to climate and resource conditions, but differ in their goals and decision-making criteria for when, how, and whether to implement those strategies. This model is based on the SequiaBasalto model (Dieguez Cameroni et al. 2012, 2014, Bommel et al. 2014 and Morales et al. 2015), replicated in NetLogo by Soler-Navarro et al. (2023).
One year is 368 days. Seasons change every 92 days. Each step begins with the growth of grass as a function of climate and season. This is followed by updating the live weight of animals according to the grass height of their patch, and grass consumption, which is determined based on the updated live weight. Animals can be supplemented by the farmer in case of severe drought. After consumption, cows grow and reproduce, and a new grass height is calculated. This updated grass height value becomes the starting grass height for the next day. Cows then move to the next area with the highest grass height. After that, cattle prices are updated and cattle sales are held on the first day of fall. In the event of a severe drought, special sales are held. Finally, at the end of the day, the farm balance and the farmer’s effort are calculated.
This paper presents an agent-based model to study the dynamics of city-state systems in a constrained environment with limited space and resources. The model comprises three types of agents: city-states, villages, and battalions, where city-states, the primary decision-makers, can build villages for food production and recruit battalions for defense and aggression. In this setting, simulation results, generated through a multi-parameter grid sampling, suggest that risk-seeking strategies are more effective in high-cost scenarios, provided that the production rate is sufficiently high. Also, the model highlights the role of output productivity in defining which strategic preferences are successful in a long-term scenario, with higher outputs supporting more aggressive expansion and military actions, while resource limitations compel more conservative strategies focused on survival and resource conservation. Finally, the results suggest the existence of a non-linear effect of diminishing returns in strategic investments on successful strategies, emphasizing the need for careful resource allocation in a competitive environment.
School Enrollment Model
Spiro Maroulis Catalina Canals Enrique Canessa Alejandra Mizala Sergio Chaigneau | Published Monday, July 08, 2024The School Enrollment Model is a spatially-explicit computational model that depicts a city, with schools and students located within the space. The model represents the Chilean school system, a market-based educational system, where people are free to choose among public, private voucher, or private fee-paying schools. In the model, students become aware of some schools, apply to schools, switch schools, pass or fail grade levels, and eventually either graduate or dropout. Schools select students, update their tuition, test scores, and other characteristics.
The purpose of the model is to represent the Chilean school system and analyze the different mechanisms that affected the enrollment distribution between public, private voucher, and private fee-paying school sectors during the period 2004-2016.
Agent-Based Model of Transhumant Decision-Making Processes in Senegal
Cheick Amed Diloma Gabriel TRAORE Etienne DELAY Alassane Bah Djibril Diop | Published Wednesday, July 03, 2024Sahelian transhumance is a type of socio-economic and environmental pastoral mobility. It involves the movement of herds from their terroir of origin (i.e., their original pastures) to one or more host terroirs, followed by a return to the terroir of origin. According to certain pastoralists, the mobility of herds is planned to prevent environmental degradation, given the continuous dependence of these herds on their environment. However, these herds emit Greenhouse Gases (GHGs) in the spaces they traverse. Given that GHGs contribute to global warming, our long-term objective is to quantify the GHGs emitted by Sahelian herds. The determination of these herds’ GHG emissions requires: (1) the artificial replication of the transhumance, and (2) precise knowledge of the space used during their transhumance.
This article presents the design of an artificial replication of the transhumance through an agent-based model named MSTRANS. MSTRANS determines the space used by transhumant herds, based on the decision-making process of Sahelian transhumants.
MSTRANS integrates a constrained multi-objective optimization problem and algorithms into an agent-based model. The constrained multi-objective optimization problem encapsulates the rationality and adaptability of pastoral strategies. Interactions between a transhumant and its socio-economic network are modeled using algorithms, diffusion processes, and within the multi-objective optimization problem. The dynamics of pastoral resources are formalized at various spatio-temporal scales using equations that are integrated into the algorithms.
The results of MSTRANS are validated using GPS data collected from transhumant herds in Senegal. MSTRANS results highlight the relevance of integrated models and constrained multi-objective optimization for modeling and monitoring the movements of transhumant herds in the Sahel. Now specialists in calculating greenhouse gas emissions have a reproducible and reusable tool for determining the space occupied by transhumant herds in a Sahelian country. In addition, decision-makers, pastoralists, veterinarians and traders have a reproducible and reusable tool to help them make environmental and socio-economic decisions.
Displaying 10 of 72 results space clear search