About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 916 results for "Bert Van Meeuwen" clear search
Peer reviewed ABM to create populations with realistic Big Five Personality Trait Expressions
Michael Vogrin | Published Tuesday, May 30, 2023This model aims at creating agent populations that have “personalities”, as described by the Big Five Model of Personality. The expression of the Big Five in the agent population has the following properties, so that they resemble real life populations as closely as possible:
-The population mean of each trait is 0.5 on a scale from 0 to 1.
-The population-wide distribution of each trait approximates a normal distribution.
-The intercorrelations of the Big Five are close to those observed in the Literature.
The literature used to fit the model was a publication by Dimitri van der Linden, Jan te Nijenhuis, and Arnold B. Bakker:
…
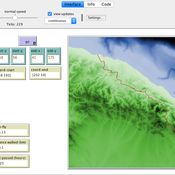
Peer reviewed Least cost path mobility
Colin Wren Claudine Gravel-Miguel | Published Saturday, September 02, 2017 | Last modified Monday, October 04, 2021This model aims to mimic human movement on a realistic topographical surface. The agent does not have a perfect knowledge of the whole surface, but rather evaluates the best path locally, at each step, thus mimicking imperfect human behavior.
Prisoner's Tournament
Kristin Crouse | Published Wednesday, November 06, 2019 | Last modified Wednesday, December 15, 2021This model replicates the Axelrod prisoner’s dilemma tournaments. The model takes as input a file of strategies and pits them against each other to see who achieves the best payoff in the end. Change the payoff structure to see how it changes the tournament outcome!
How does the world population adapt its policies on energy when it is confronted with a climate change? This model combines a climate-economy model with adaptive agents.
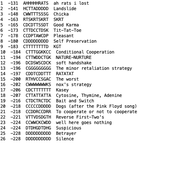
The relationship between product information quantity and diversity of consumer decisions
Marco Janssen Takao Sasaki David Vaughn Becker Rebecca Neel | Published Tuesday, October 27, 2015We developed an agent-based model to explore underlying mechanisms of behavioral clustering that we observed in human online shopping experiments.
Location Analysis Hybrid ABM
Lukasz Kowalski | Published Friday, February 08, 2019The purpose of this hybrid ABM is to answer the question: where is the best place for a new swimming pool in a region of Krakow (in Poland)?
The model is well described in ODD protocol, that can be found in the end of my article published in JASSS journal (available online: http://jasss.soc.surrey.ac.uk/22/1/1.html ). Comparison of this kind of models with spatial interaction ones, is presented in the article. Before developing the model for different purposes, area of interest or services, I recommend reading ODD protocol and the article.
I published two films on YouTube that present the model: https://www.youtube.com/watch?v=iFWG2Xv20Ss , https://www.youtube.com/watch?v=tDTtcscyTdI&t=1s
…
Nudging agents in social networks for collective action
Marco Janssen | Published Sunday, August 14, 2011 | Last modified Sunday, March 17, 2019Agents are linked in a social-network and make decisions on which of 2 types of behavior to adopt. We explore consequences of different information feedback and providing targeted feedback to individuals.
Peer reviewed An agent-based model to identify management practices, integrity and performance in Kenya’s and Ghana’s Water Service Delivery
Georg Holtz Claudia Pahl-Wostl Francesc Bellaubi | Published Sunday, March 09, 2014 | Last modified Tuesday, July 15, 2014The ABM looks at how the performance of Water Service Delivery is affected by the relation between management practices and integrity in terms of transparency, accountability and participation
AgriAdopt
Sebastian Rasch | Published Tuesday, March 26, 2024The purpose of this model is to project the dynamics of technology adoption of autonomous weeding robots by sugar beet producing farmers in North Rhine-Westphalia (NRW). Moreover, the design of the model serves the purpose to investigate second-order effects of robot adoption on shifts in farm income and on production quantities of main crops produced in North Rhine-Westphalia. One aim is to analyse the impact of technology attributes and costs of pesticides on adoption patterns.
A Model of the Gender Cliff in the Relative Contribution to the Household Income
André Grow Jan Van Bavel | Published Wednesday, December 18, 2019In Western countries, the distribution of relative incomes within marriages tends to be skewed in a remarkable way. Husbands usually do not only earn more than their female partners, but there also is a striking discontinuity in their relative contributions to the household income at the 50/50 point: many wives contribute just a bit less than or as much as their husbands, but few contribute more. Our model makes it possible to study a social mechanism that might create this ‘cliff’: women and men differ in their incomes (even outside marriage) and this may differentially affect their abilities to find similar- or higher-income partners. This may ultimately contribute to inequalities within the households that form. The model and associated files make it possible to assess the merit of this mechanism in 27 European countries.
Displaying 10 of 916 results for "Bert Van Meeuwen" clear search