About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 5 of 5 results group identity clear search
Identity Fusion Group Behaviour Simulator
Leonardo D. Martins Araujo Roberto Cesar Betini | Published Monday, June 03, 2024The model is based on Swann and Buhrmester’s Identity Fusion behavioural theory, which seeks to explain why an individual puts the group’s priorities above their personal expectations. In order to observe the theory and validate group behaviour, a case study was carried out focusing on scenarios of group violence in football stadiums in Brazil. For the modelling, each agent has a distribution of levels of identification with the group to which they belong, with their level of fusion varying between 1 and 5. According to behavioural theory, an individual’s degree of fusion with the group directly interferes with their behaviour of replicating actions and absorbing group beliefs.
Agent-based model of team decision-making in hidden profile situations
Andreas Flache Jonas Stein Vincenz Frey | Published Thursday, April 20, 2023 | Last modified Friday, November 17, 2023The model presented here is extensively described in the paper ‘Talk less to strangers: How homophily can improve collective decision-making in diverse teams’ (forthcoming at JASSS). A full replication package reproducing all results presented in the paper is accessible at https://osf.io/76hfm/.
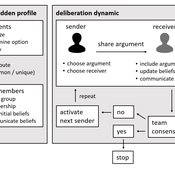
Narrative documentation includes a detailed description of the model, including a schematic figure and an extensive representation of the model in pseudocode.
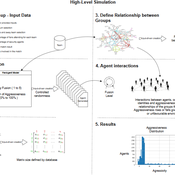
The model develops a formal representation of a diverse work team facing a decision problem as implemented in the experimental setup of the hidden-profile paradigm. We implement a setup where a group seeks to identify the best out of a set of possible decision options. Individuals are equipped with different pieces of information that need to be combined to identify the best option. To this end, we assume a team of N agents. Each agent belongs to one of M groups where each group consists of agents who share a common identity.
The virtual teams in our model face a decision problem, in that the best option out of a set of J discrete options needs to be identified. Every team member forms her own belief about which decision option is best but is open to influence by other team members. Influence is implemented as a sequence of communication events. Agents choose an interaction partner according to homophily h and take turns in sharing an argument with an interaction partner. Every time an argument is emitted, the recipient updates her beliefs and tells her team what option she currently believes to be best. This influence process continues until all agents prefer the same option. This option is the team’s decision.
ACTING (Affect Control Theory based simulation of Interaction in Networked Groups)
nikozoe | Published Thursday, August 19, 2021This agent-based simulation model for group interaction is rooted in social psychological theory. The
model integrates affect control theory with networked interaction structures and sequential behavior protocols as they are often encountered in task groups. By expressing status hierarchy through network structure we build a bridge between expectation states theory and affect control theory, and are able to reproduce central results from the expectation states research program in sociological social psychology. Furthermore, we demonstrate how the model can be applied to analyze specialized task groups or sub-cultural domains by combining it with empirical data sources. As an example, we simulate groups of open-source software developers and analyze how cultural expectations influence the occupancy of high status positions in these groups.

PSMED - Patagonia Simple Model of Ethnic Differentiation
Xavier Vilà Joan A Barceló J A Cuesta Florencia Del Castillo Ricardo Del Olmo José M Galán Laura Mameli Francisco J Miguel David Poza José I Santos | Published Tuesday, December 10, 2013Patagonia PSMED is an agent-based model designed to study a simple case of Evolution of Ethnic Differentiation. It replicates how can hunter-gatherer societies evolve and built cultural identities as a consequence of the way they interacted.
A Computational Model of Workers Protest
Jae-Woo Kim | Published Friday, May 13, 2011 | Last modified Saturday, April 27, 2013We present an agent-based model of worker protest informed by Epstein (2002). Workers have varying degrees of grievance depending on the difference between their wage and the average of their neighbors. They protest with probabilities proportional to grievance, but are inhibited by the risk of being arrested – which is determined by the ratio of coercive agents to probable rebels in the local area. We explore the effect of similarity perception on the dynamics of collective behavior. If […]