Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 455 results simulation clear search
Hollywood Underrepresentation Simulated Causes
Carmen Iasiello | Published Sunday, November 26, 2023Presented here is a socioeconomic agent-based model (ABM) to examine the Hollywood labor system as a network within a simulated movie labor market based on preferential attachment and compare the findings with 50 co-production ego networks during the 2015 movie year. Using the ABM, I test the role slight individual preference for racial and ethnic similarity within one’s own network at the microlevel and find that it is insufficient to explain the phenomena of racial and ethnic underrepresentation at the macrolevel. The ABM also includes the ability to test alternative explanations, such as overt opportunity loss as a possible explanation.
ABM Simulation of Transition from Late Longshan Cultures to Early Erlitou Culture
Carmen Iasiello | Published Sunday, November 26, 2023Within the archeological record for Bronze Age Chinese culture, there continues to be a gap in our understanding of the sudden rise of the Erlitou State from the previous late Longshan chiefdoms. In order to examine this period, I developed and used an agent-based model (ABM) to explore possible socio-politically relevant hypotheses for the gap between the demise of the late Longshan cultures and rise of the first state level society in East Asia. I tested land use strategy making and collective action in response to drought and flooding scenarios, the two plausible environmental hazards at that time. The model results show cases of emergent behavior where an increase in social complexity could have been experienced if a catastrophic event occurred while the population was sufficiently prepared for a different catastrophe, suggesting a plausible lead for future research into determining the life of the time period.
The ABM published here was originally developed in 2016 and its results published in the Proceedings of the 2017 Winter Simulation Conference.
DARTS: an agent-based model of the global food system for studying its resilience to shocks
Hubert Fonteijn | Published Wednesday, November 22, 2023DARTS simulates food systems in which agents produce, consume and trade food. Here, food is a summary item that roughly corresponds to commodity food types (e.g. rice). No other food types are taken into account. Each food system (World) consists of its own distribution of agents, regions and connections between agents. Agents differ in their ability to produce food, earn off-farm income and trade food. The agents aim to satisfy their food requirements (which are fixed and equal across agents) by either their own food production or by food purchases. Each simulation step represents one month, in which agents can produce (if they have productive capacity and it is a harvest month for their region), earn off-farm income, trade food (both buy and sell) and consume food. We evaluate the performance of the food system by averaging the agents’ food satisfaction, which is defined as the ratio of the food consumed by each agent at the end of each month divided by her food requirement. At each step, any of the abovementioned attributes related to the agents’ ability to satisfy their food requirement can (temporarily) be shocked. These shocks include reducing the amount of food they produce, removing their ability to trade locally or internationally and reducing their cash savings. Food satisfaction is quantified (both immediately after the shock and in the year following the shock) to evaluate food security of a particular food system, both at the level of agent types (e.g. the urban poor and the rural poor) and at the systems level. Thus, the effects of shocks on food security can be related to the food system’s structure.
Simulating Social Interaction in Times of COVID Restrictions
Oscar de Vries | Published Friday, November 17, 2023Social distancing is a strategy to mitigate the spread of contagious disease, but it bears negative impacts on people’s social well-being, resulting in non-compliance. This paper uses an integrated behavioral simulation model, called HUMAT, to identify a sweet spot
that balances strictness of and obedience to social distancing rules.
A novel agent-based model was developed that aims to explore social interaction while it is constrained by visitor limitations (due to Dutch COVID measures). Specifically, the model aims to capture the interaction between the need for social contact and the support for the visitors measure. The model was developed using the HUMAT integrated framework, which offered a psychological and sociological foundation for the behavior of the agents.

Peer reviewed COMMONSIM: Simulating the utopia of COMMONISM
Lena Gerdes Manuel Scholz-Wäckerle Ernest Aigner Stefan Meretz Jens Schröter Hanno Pahl Annette Schlemm Simon Sutterlütti | Published Sunday, November 05, 2023This research article presents an agent-based simulation hereinafter called COMMONSIM. It builds on COMMONISM, i.e. a large-scale commons-based vision for a utopian society. In this society, production and distribution of means are not coordinated via markets, exchange, and money, or a central polity, but via bottom-up signalling and polycentric networks, i.e. ex-ante coordination via needs. Heterogeneous agents care for each other in life groups and produce in different groups care, environmental as well as intermediate and final means to satisfy sensual-vital needs. Productive needs decide on the magnitude of activity in groups for a common interest, e.g. the production of means in a multi-sectoral artificial economy. Agents share cultural traits identified by different behaviour: a propensity for egoism, leisure, environmentalism, and productivity. The narrative of this utopian society follows principles of critical psychology and sociology, complexity and evolution, the theory of commons, and critical political economy. The article presents the utopia and an agent-based study of it, with emphasis on culture-dependent allocation mechanisms and their social and economic implications for agents and groups.
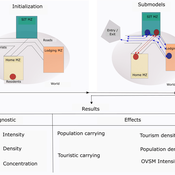
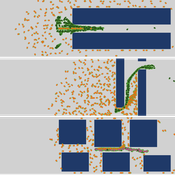
Peer reviewed ABM Overtourism Santa Marta
Janwar Moreno | Published Monday, October 23, 2023This model presents the simulation model of a city in the context of overtourism. The study area is the city of Santa Marta in Colombia. The purpose is to illustrate the spatial and temporal distribution of population and tourists in the city. The simulation analyzes emerging patterns that result from the interaction between critical components in the touristic urban system: residents, urban space, touristic sites, and tourists. The model is an Agent-Based Model (ABM) with the GAMA software. Also, it used public input data from statistical centers, geographical information systems, tourist websites, reports, and academic articles. The ABM includes assessing some measures used to address overtourism. This is a field of research with a low level of analysis for destinations with overtourism, but the ABM model allows it. The results indicate that the city has a high risk of overtourism, with spatial and temporal differences in the population distribution, and it illustrates the effects of two management measures of the phenomenon on different scales. Another interesting result is the proposed tourism intensity indicator (OVsm), taking into account that the tourism intensity indicators used by the literature on overtourism have an overestimation of tourism pressures.

Peer reviewed HUMLAND: HUMan impact on LANDscapes agent-based model
Fulco Scherjon Anastasia Nikulina Anhelina Zapolska Maria Antonia Serge Marco Davoli Dave van Wees Katharine MacDonald | Published Monday, October 16, 2023The HUMan impact on LANDscapes (HUMLAND) model has been developed to track and quantify the intensity of different impacts on landscapes at the continental level. This agent-based model focuses on determining the most influential factors in the transformation of interglacial vegetation with a specific emphasis on burning organized by hunter-gatherers. HUMLAND integrates various spatial datasets as input and target for the agent-based model results. Additionally, the simulation incorporates recently obtained continental-scale estimations of fire return intervals and the speed of vegetation regrowth. The obtained results include maps of possible scenarios of modified landscapes in the past and quantification of the impact of each agent, including climate, humans, megafauna, and natural fires.
Peer reviewed A Bayesian Nash Equilibrium (BNE)-informed ABM for pedestrian evacuation in different constricted spaces
Jiaqi Ge Yiyu Wang Alexis Comber | Published Wednesday, October 11, 2023This BNE-informed ABM ultimately aims to provide a more realistic description of complicated pedestrian behaviours especially in high-density and life-threatening situations. Bayesian Nash Equilibrium (BNE) was adopted to reproduce interactive decision-making process among rational and game-playing agents. The implementations of 3 behavioural models, which are Shortest Route (SR) model, Random Follow (RF) model, and BNE model, make it possible to simulate emergent patterns of pedestrian behaviours (e.g. herding and self-organised queuing behaviours, etc.) in emergency situations.
According to the common features of previous mass trampling accidents, a series of simulation experiments were performed in space with 3 types of barriers, which are Horizontal Corridors, Vertical Corridors, and Random Squares, standing for corridors, bottlenecks and intersections respectively, to investigate emergent behaviours of evacuees in varied constricted spatial environments. The output of this ABM has been available at https://data.mendeley.com/datasets/9v4byyvgxh/1.
Controlling the misinformation diffusion in social media by the effect of different classes of agents
Ali Khodabandeh Yalabadi | Published Thursday, October 05, 2023An agent-based framework to simulate the diffusion process of a piece of misinformation according to the SBFC model in which the fake news and its debunking compete in a social network. Considering new classes of agents, this model is closer to reality and proposed different strategies how to mitigate and control misinformation.
Gender Disparity in COVID-19’s Impact on Academic Careers: An Agent-Based Model
S.R. Aurora (a.k.a. Mai P. Trinh) Chantal van Esch | Published Tuesday, September 26, 2023Prior to COVID-19, female academics accounted for 45% of assistant professors, 37% of associate professors, and 21% of full professors in business schools (Morgan et al., 2021). The pandemic arguably widened this gender gap, but little systemic data exists to quantify it. Our study set out to answer two questions: (1) How much will the COVID-19 pandemic have impacted the gender gap in U.S. business school tenured and tenure-track faculty? and (2) How much will institutional policies designed to help faculty members during the pandemic have affected this gender gap? We used agent-based modeling coupled with archival data to develop a simulation of the tenure process in business schools in the U.S. and tested how institutional interventions would affect this gender gap. Our simulations demonstrated that the gender gap in U.S. business schools was on track to close but would need further interventions to reach equality (50% females). In the long-term picture, COVID-19 had a small impact on the gender gap, as did dependent care assistance and tenure extensions (unless only women received tenure extensions). Changing performance evaluation methods to better value teaching and service activities and increasing the proportion of female new hires would help close the gender gap faster.
Displaying 10 of 455 results simulation clear search