About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 11 results spatial model clear search
Peer reviewed A Simple Agent-Based Spatial Model of the Economy: Tools for Policy
Bernardo Furtado Isaque Daniel Rocha Eberhardt | Published Tuesday, July 05, 2022This study simulates the evolution of artificial economies in order to understand the tax relevance of administrative boundaries in the quality of life of its citizens. The modeling involves the construction of a computational algorithm, which includes citizens, bounded into families; firms and governments; all of them interacting in markets for goods, labor and real estate. The real estate market allows families to move to dwellings with higher quality or lower price when the families capitalize property values. The goods market allows consumers to search on a flexible number of firms choosing by price and proximity. The labor market entails a matching process between firms (given its location) and candidates, according to their qualification. The government may be configured into one, four or seven distinct sub-national governments, which are all economically conurbated. The role of government is to collect taxes on the value added of firms in its territory and invest the taxes into higher levels of quality of life for residents. The results suggest that the configuration of administrative boundaries is relevant to the levels of quality of life arising from the reversal of taxes. The model with seven regions is more dynamic, but more unequal and heterogeneous across regions. The simulation with only one region is more homogeneously poor. The study seeks to contribute to a theoretical and methodological framework as well as to describe, operationalize and test computer models of public finance analysis, with explicitly spatial and dynamic emphasis. Several alternatives of expansion of the model for future research are described. Moreover, this study adds to the existing literature in the realm of simple microeconomic computational models, specifying structural relationships between local governments and firms, consumers and dwellings mediated by distance.
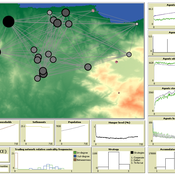
FlipFlop1-ProMEERB: A coupled social-ecological model with a promotional mechanism for emergence of environmentally responsible behavior
Liliana Perez Saeed Harati Roberto Molowny-Horas | Published Friday, December 17, 2021At the heart of a study of Social-Ecological Systems, this model is built by coupling together two independently developed models of social and ecological phenomena. The social component of the model is an abstract model of interactions of a governing agent and several user agents, where the governing agent aims to promote a particular behavior among the user agents. The ecological model is a spatial model of spread of the Mountain Pine Beetle in the forests of British Columbia, Canada. The coupled model allowed us to simulate various hypothetical management scenarios in a context of forest insect infestations. The social and ecological components of this model are developed in two different environments. In order to establish the connection between those components, this model is equipped with a ‘FlipFlop’ - a structure of storage directories and communication protocols which allows each of the models to process its inputs, send an output message to the other, and/or wait for an input message from the other, when necessary. To see the publications associated with the social and ecological components of this coupled model please see the References section.

Local extinctions, connectedness, and cultural evolution in structured populations
Luke Premo | Published Tuesday, May 25, 2021This model is designed to address the following research question: How does the amount and topology of intergroup cultural transmission modulate the effect of local group extinction on selectively neutral cultural diversity in a geographically structured population? The experimental design varies group extinction rate, the amount of intergroup cultural transmission, and the topology of intergroup cultural transmission while measuring the effects of local group extinction on long-term cultural change and regional cultural differentiation in a constant-size, spatially structured population. The results show that for most of the intergroup social network topologies tested here, increasing the amount of intergroup cultural transmission (similar to increasing gene flow in a genetic model) erases the negative effect of local group extinction on selectively neutral cultural diversity. The stochastic (i.e., preference attachment) network seems to stand out as an exception.
AncientS-ABM: Agent-Based Modeling of Past Societies Social Organization
Angelos Chliaoutakis | Published Thursday, April 09, 2020AncientS-ABM is an agent-based model for simulating and evaluating the potential social organization of an artificial past society, configured by available archaeological data. Unlike most existing agent-based models used in archaeology, our ABM framework includes completely autonomous, utility-based agents. It also incorporates different social organization paradigms, different decision-making processes, and also different cultivation technologies used in ancient societies. Equipped with such paradigms, the model allows us to explore the transition from a simple to a more complex society by focusing on the historical social dynamics; and to assess the influence of social organization on agents’ population growth, agent community numbers, sizes and distribution.
AncientS-ABM also blends ideas from evolutionary game theory with multi-agent systems’ self-organization. We model the evolution of social behaviours in a population of strategically interacting agents in repeated games where they exchange resources (utility) with others. The results of the games contribute to both the continuous re-organization of the social structure, and the progressive adoption of the most successful agent strategies. Agent population is not fixed, but fluctuates over time, while agents in stage games also receive non-static payoffs, in contrast to most games studied in the literature. To tackle this, we defined a novel formulation of the evolutionary dynamics via assessing agents’ rather than strategies’ fitness.
As a case study, we employ AncientS-ABM to evaluate the impact of the implemented social organization paradigms on an artificial Bronze Age “Minoan” society, located at different geographical parts of the island of Crete, Greece. Model parameter choices are based on archaeological evidence and studies, but are not biased towards any specific assumption. Results over a number of different simulation scenarios demonstrate better sustainability for settlements consisting of and adopting a socio-economic organization model based on self-organization, where a “heterarchical” social structure emerges. Results also demonstrate that successful agent societies adopt an evolutionary approach where cooperation is an emergent strategic behaviour. In simulation scenarios where the natural disaster module was enabled, we observe noticeable changes in the settlements’ distribution, relating to significantly higher migration rates immediately after the modeled Theran eruption. In addition, the initially cooperative behaviour is transformed to a non-cooperative one, thus providing support for archaeological theories suggesting that the volcanic eruption led to a clear breakdown of the Minoan socio-economic system.
…
Imperfect knowledge and stable governance in democracies
Carlos M Fernández-Márquez Francisco Jose Vazquez Luis Fernando Medina | Published Tuesday, February 05, 2019In this paper we introduce an agent-based model of elections and government formation where voters do not have perfect knowledge about the parties’ ideological position. Although voters are boundedly rational, they are forward-looking in that they try to assess the likely impact of the different parties over the resulting government. Thus, their decision rules combine sincere and strategic voting: they form preferences about the different parties but deem some of them as inadmissible and try to block them from office. We find that the most stable and durable coalition governments emerge at intermediate levels of informational ambiguity. When voters have very poor information about the parties, their votes are scattered too widely, preventing the emergence of robust majorities. But also, voters with highly precise perceptions about the parties will cluster around tiny electoral niches with a similar aggregate effect.
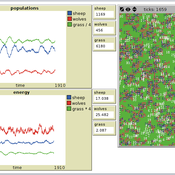
A spatial model of resource-consumer dynamics
Arend Ligtenberg Guus Ten Broeke George Ak Van Voorn Jaap Molenaar | Published Wednesday, January 11, 2017 | Last modified Thursday, September 17, 2020The model simulates agents in a spatial environment competing for a common resource that grows on patches. The resource is converted to energy, which is needed for performing actions and for surviving.
A simple agent-based spatial model of the economy
Bernardo Alves Furtado Isaque Daniel Rocha Eberhardt | Published Thursday, March 10, 2016 | Last modified Tuesday, November 22, 2016The modeling includes citizens, bounded into families; firms and governments; all of them interacting in markets for goods, labor and real estate. The model is spatial and dynamic.
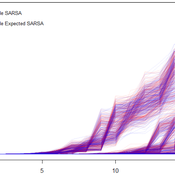
Peer reviewed PPHPC - Predator-Prey for High-Performance Computing
Nuno Fachada | Published Saturday, August 08, 2015 | Last modified Wednesday, November 25, 2015PPHPC is a conceptual model for studying and evaluating implementation strategies for spatial agent-based models (SABMs). It is a realization of a predator-prey dynamic system, and captures important SABMs characteristics.
Transitions between homophilic and heterophilic modes of cooperation
Genki Ichinose | Published Sunday, June 14, 2015 | Last modified Sunday, November 14, 2021In our model, individual agents are distributed over a two-dimensional square lattice. The agents play the prisoner’s dilemma game with their neighbors, imitate the highest strategy, and then migrate to empty sites based on their tag preference.
Spatial model of the noisy Prisoner's Dilemma with reward shift
Matus Halas | Published Thursday, March 05, 2015 | Last modified Tuesday, May 29, 2018Interactions of players embedded in a closed square lattice are determined by distance and overall gains and they lead to shifts of reward payoff between temptation and punishment. A new winner balancing against threats is ultimately discovered.
Displaying 10 of 11 results spatial model clear search