About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 60 results agent-based model (abm) clear search
Youth and their Artificial Social Environmental Risk and Promotive Scores (Ya-TASERPS)
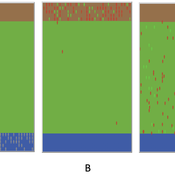
JoAnn Lee | Published Wednesday, July 07, 2021 | Last modified Friday, February 24, 2023Risk assessments are designed to measure cumulative risk and promotive factors for delinquency and recidivism, and are used by criminal and juvenile justice systems to inform sanctions and interventions. Yet, these risk assessments tend to focus on individual risk and often fail to capture each individual’s environmental risk. This agent-based model (ABM) explores the interaction of individual and environmental risk on the youth. The ABM is based on an interactional theory of delinquency and moves beyond more traditional statistical approaches used to study delinquency that tend to rely on point-in-time measures, and to focus on exploring the dynamics and processes that evolve from interactions between agents (i.e., youths) and their environments. Our ABM simulates a youth’s day, where they spend time in schools, their neighborhoods, and families. The youth has proclivities for engaging in prosocial or antisocial behaviors, and their environments have likelihoods of presenting prosocial or antisocial opportunities.
Formal Organization Hierarchy and Informal Networks - "The Company Behind the Org Chart"
Tom Briggs | Published Sunday, April 18, 2021A generalized organizational agent- based model (ABM) containing both formal organizational hierarchy and informal social networks simulates organizational processes that occur over both formal network ties and informal networks.
TunaFisher ABM
Guus Ten Broeke | Published Wednesday, January 13, 2021TunaFisher ABM simulates the decisions of fishing companies and fishing vessels of the Philippine tuna purse seinery operating in the Celebes and Sulu Seas.
High fishing effort remains in many of the world’s fisheries, including the Philippine tuna purse seinery, despite a variety of policies that have been implemented to reduce it. These policies have predominantly focused on models of cause and effect which ignore the possibility that the intended outcomes are altered by social behavior of autonomous agents at lower scales.
This model is a spatially explicit Agent-based Model (ABM) for the Philippine tuna purse seine fishery, specifically designed to include social behavior and to study its effects on fishing effort, fish stock and industry profit. The model includes economic and social factors of decision making by companies and fishing vessels that have been informed by interviews.
…
VIDA: A simulation model of domestic VIolence in times of social DistAncing
Bernardo Furtado | Published Monday, January 11, 2021Violence against women occurs predominantly in the family and domestic context. The COVID-19 pandemic led Brazil to recommend and, at times, impose social distancing, with the partial closure of economic activities, schools, and restrictions on events and public services. Preliminary evidence shows that intense co- existence increases domestic violence, while social distancing measures may have prevented access to public services and networks, information, and help. We propose an agent-based model (ABM), called VIDA, to illustrate and examine multi-causal factors that influence events that generate violence. A central part of the model is the multi-causal stress indicator, created as a probability trigger of domestic violence occurring within the family environment. Two experimental design tests were performed: (a) absence or presence of the deterrence system of domestic violence against women and measures to increase social distancing. VIDA presents comparative results for metropolitan regions and neighbourhoods considered in the experiments. Results suggest that social distancing measures, particularly those encouraging staying at home, may have increased domestic violence against women by about 10%. VIDA suggests further that more populated areas have comparatively fewer cases per hundred thousand women than less populous capitals or rural areas of urban concentrations. This paper contributes to the literature by formalising, to the best of our knowledge, the first model of domestic violence through agent-based modelling, using empirical detailed socioeconomic, demographic, educational, gender, and race data at the intraurban level (census sectors).
Agent Based Integrated Assessment Model
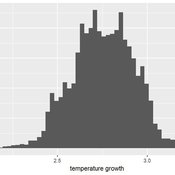
Marcin Czupryna | Published Saturday, June 27, 2020Agent based approach to the class of the Integrated Assessment Models. An agent-based model (ABM) that focuses on the energy sector and climate relevant facts in a detailed way while being complemented with consumer goods, labour and capital markets to a minimal necessary extent.
An agent-based model of building occupant behavior during load shedding
Handi Chandra Putra | Published Thursday, May 21, 2020Load shedding enjoys increasing popularity as a way to reduce power consumption in buildings during hours of peak demand on the electricity grid. This practice has well known cost saving and reliability benefits for the grid, and the contracts utilities sign with their “interruptible” customers often pass on substantial electricity cost savings to participants. Less well-studied are the impacts of load shedding on building occupants, hence this study investigates those impacts on occupant comfort and adaptive behaviors. It documents experience in two office buildings located near Philadelphia (USA) that vary in terms of controllability and the set of adaptive actions available to occupants. An agent-based model (ABM) framework generalizes the case-study insights in a “what-if” format to support operational decision making by building managers and tenants. The framework, implemented in EnergyPlus and NetLogo, simulates occupants that have heterogeneous
thermal and lighting preferences. The simulated occupants pursue local adaptive actions such as adjusting clothing or using portable fans when central building controls are not responsive, and experience organizational constraints, including a corporate dress code and miscommunication with building managers. The model predicts occupant decisions to act fairly well but has limited ability to predict which specific adaptive actions occupants will select.

We construct a new type of agent-based model (ABM) that can simultaneously simulate land-use changes at multiple distant places (namely TeleABM, telecoupled agent-based model). We use soybean trade between Brazil and China as an example, where Brazil is the sending system and China is the receiving system because they are the world’s largest soybean exporter and importer respectively. We select one representative county in each country to calibrate and validate the model with spatio-temporal analysis of historical land-use changes and the empirical analysis of household survey data. The whole model is programmed on RePast Simphony. The most unique features of TeleABM are that it can simulate a telecoupled system and the flows between sending and receiving systems in this telecoupled system.
Managing networked landscapes: conservation in fragmented, regionally connected world
Jacopo A. Baggio Michael Schoon Sechindra Vallury | Published Monday, December 09, 2019Exploring how learning and social-ecological networks influence management choice set and their ability to increase the likelihood of species coexistence (i.e. biodiversity) on a fragmented landscape controlled by different managers.
Peer reviewed COMMAND-AND-CONTROL
Farzaneh Davari | Published Tuesday, September 10, 2019 | Last modified Thursday, September 12, 2019The command and control policy in natural resource management, including water resources, is a longstanding established policy that has been theoretically and practically argued from the point of view of social-ecological complex systems. With the intention of making a system ecologically resilient, these days, policymakers apply the top-down policies of controlling communities through regulations. To explore how these policies may work and to understand whether the ecological goal can be achieved via command and control policy, this research uses the capacity of Agent-Based Modeling (ABM) as an experimental platform in the Urmia Lake Basin (ULB) in Iran, which is a social-ecological complex system and has gone through a drought process.
Despite the uncertainty of the restorability capacity of the lake, there has been a consensus on the possibility to artificially restore the lake through the nationally managed Urmia Lake Restoratoin Program (ULRP). To reduce water consumption in the Basin, the ULRP widely targets the agricultural sector and proposes the project of changing crop patterns from high-water-demand (HWD) to low-water-demand (LWD), which includes a component to control water consumption by establishing water-police forces.
Using a wide range of multidisciplinary studies about Urmia Lake at the Basin and sub-basins as well as qualitative information at micro-level as the main conceptual sources for the ABM, the findings under different strategies indicate that targeting crop patterns change by legally limiting farmers’ access to water could force farmers to change their crop patterns for a short period of time as long as the number of police constantly increases. However, it is not a sustainable policy for either changing the crop patterns nor restoring the lake.
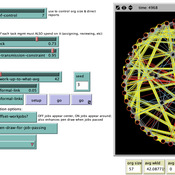
An agent-based artificial stock with a dynamic investor network
Matthew Oldham | Published Tuesday, June 25, 2019The model is an agent-based artificial stock market where investors connect in a dynamic network. The network is dynamic in the sense that the investors, at specified intervals, decide whether to keep their current adviser (those investors they receive trading advise from). The investors also gain information from a private source and share public information about the risky asset. Investors have different tendencies to follow the different information sources, consider differing amounts of history, and have different thresholds for investing.
Displaying 10 of 60 results agent-based model (abm) clear search