Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 83 results Any clear search
STiMUS-HAI: A Stigmergic–Mutualistic Agent-Based Model of Human-AI Collaboration on Shared Digital Artefacts
Yevgeny Patarakin | Published Monday, July 13, 2026STiMUS-HAI (Stigmergic–Mutualistic IMOI Model, Human-AI extension) is an agent-based model of teamwork in socio-technical systems where human and AI contributors collaborate through shared digital artefacts — wiki pages, code files, issue tickets, project cards, Scratch projects — represented as patches in a NetLogo world. It extends the human-only base model STiMUS v2.2, which established that two coordination mechanisms — stigmergy (indirect coordination through traces left in the environment) and mutualism (mutual benefit between contributors and the artefacts they tend) — can be decoupled: stigmergy decides where a contributor works, mutualism decides with what effort. STiMUS-HAI preserves this decoupling unchanged and adds two further theoretical questions: whether mixing AI agents into a human team distorts human coordination in ways that aggregate indicators hide, and whether AI’s cost to team outcomes depends on the type of work AI performs, not only on how much of it is present.
Two breeds of turtle — humans and ai-agents — follow identical target-selection, pheromone, and mutualism rules, so that any behavioural difference is attributable to team composition rather than a built-in advantage. The one designed asymmetry: AI agents never accumulate shared-mental-model and their motivation is fixed rather than adaptive. On top of this v3.0 baseline, v3.1 adds a task-type dimension to artefacts (“prediction” versus “judgment”, set via a judgment-share slider) that scales down AI edit-power specifically on judgment-requiring artefacts, and an ai-trust mechanic: humans build or lose trust in AI contributions based on the population-relative percentile rank of observed AI work quality (bottom-quartile work counts as an observed “error”), and that trust gates how much mutualistic benefit a human derives from continuing an AI’s work. Trust erodes quickly on a single error and recovers only after a streak of confirmed successes — an intentional asymmetry.
Peer reviewed Casting: A Bio-Inspired Method for Restructuring Machine Learning Ensembles
Colin Lynch Bryan Daniels | Published Thursday, September 18, 2025The wisdom of the crowd refers to the phenomenon in which a group of individuals, each making independent decisions, can collectively arrive at highly accurate solutions—often more accurate than any individual within the group. This principle relies heavily on independence: if individual opinions are unbiased and uncorrelated, their errors tend to cancel out when averaged, reducing overall bias. However, in real-world social networks, individuals are often influenced by their neighbors, introducing correlations between decisions. Such social influence can amplify biases, disrupting the benefits of independent voting. This trade-off between independence and interdependence has striking parallels to ensemble learning methods in machine learning. Bagging (bootstrap aggregating) improves classification performance by combining independently trained weak learners, reducing bias. Boosting, on the other hand, explicitly introduces sequential dependence among learners, where each learner focuses on correcting the errors of its predecessors. This process can reinforce biases present in the data even if it reduces variance. Here, we introduce a new meta-algorithm, casting, which captures this biological and computational trade-off. Casting forms partially connected groups (“castes”) of weak learners that are internally linked through boosting, while the castes themselves remain independent and are aggregated using bagging. This creates a continuum between full independence (i.e., bagging) and full dependence (i.e., boosting). This method allows for the testing of model capabilities across values of the hyperparameter which controls connectedness. We specifically investigate classification tasks, but the method can be used for regression tasks as well. Ultimately, casting can provide insights for how real systems contend with classification problems.
An agent-based model of the journey of victim/survivors through local authority domestic abuse support services in the UK
Bruce Edmonds | Published Monday, July 28, 2025This model played a small part in the UK government’s review of the working of local authority implementation of the Domestic Abuse legislation. The model explicitly represents victim-survivor families as they: (a) try to contact the local DA support system, (b) are triaged by the system and (if there is space) allocated to safe temporary accomodation (c) recieve support services from this position and (d) eventually move on to more permenant accomodation. The purpose of the model was to understand some possible ways in which the implementation of DA Duty, might be frustrated in practice, the identification of gaps in the evidence base and to inform the developing Theory of Change. The key measures used for assessing outcomes in the model were the number of families helped and the services that were delivered to them. The exploration was grounded for in two archetypal cases: that of a relatively immature system for the delivery of DA services and a more mature one (based on actual local authority cases, but not based on any single one). See the official report under associated publications for a summary of results.

Peer reviewed Descriptive Norm and Fraud Dynamics
Alexandra Eckert Matthias Meyer Christian Stindt | Published Tuesday, January 07, 2025 | Last modified Tuesday, March 24, 2026The “Descriptive Norm and Fraud Dynamics” model demonstrates how fraudulent behavior can either proliferate or be contained within non-hierarchical organizations, such as peer networks, through social influence taking the form of a descriptive norm. This model expands on the fraud triangle theory, which posits that an individual must concurrently possess a financial motive, perceive an opportunity, and hold a pro-fraud attitude to engage in fraudulent activities (red agent). In the absence of any of these elements, the individual will act honestly (green agent).
The model explores variations in a descriptive norm mechanism, ranging from local distorted knowledge to global perfect knowledge. In the case of local distorted knowledge, agents primarily rely on information from their first-degree colleagues. This knowledge is often distorted because agents are slow to update their empirical expectations, which are only partially revised after one-to-one interactions. On the other end of the spectrum, local perfect knowledge is achieved by incorporating a secondary source of information into the agents’ decision-making process. Here, accurate information provided by an observer is used to update empirical expectations.
The model shows that the same variation of the descriptive norm mechanism could lead to varying aggregate fraud levels across different fraud categories. Two empirically measured norm sensitivity distributions associated with different fraud categories can be selected into the model to see the different aggregate outcomes.
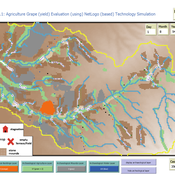
Peer reviewed Agriculture.Grape.yield.Evaluation.using.NetLogo.based.Technology.Simulation (AGENTS): A NetLogo agent-based model developed to assess viticulture efficiency in Byzantine Shivta.
Barak Garty Gil Gambash Guy BarOz Sharona T Levy | Published Friday, December 06, 2024AGENTS model is an agent-based computational framework designed to explore the socio-ecological and economic dynamics of agricultural production in the Byzantine Negev Highlands, with a focus on viticulture. It integrates historical, environmental, and social factors to simulate settlement sustainability, crop yields, and the impacts of varying climate conditions. The model is built in NetLogo and incorporates GIS-based topographical and hydrological data. Key features include the ability to assess climate impacts on crop profitability and settlement strategies, evaluate economic outputs of ancient vineyards, and simulate agent decision-making processes under diverse scenarios.
The AGENTS model is highly flexible, enabling users to simulate agricultural regimes with any two crops: one cash crop (a crop grown for profit, e.g., grapevines) and one staple crop (a crop grown for subsistence, e.g., wheat). While the default setup models viticulture and wheat cultivation in the Byzantine Negev Highlands, users can adapt the model to different environmental and socio-ecological contexts worldwide—both past and present.
Users can load external files to customize precipitation, evaporation, topography, and labor costs (measured as man-days per 0.1ha, converted to kg of wheat per model patch size area), and can also edit key parameters related to yield calculations. This includes modifying crop-specific yield formulas, soil and runoff indices, and any factors influencing crop performance. The model inherently simulates cash crops grown in floodplain regions and staple crops cultivated along riverbanks, providing a powerful tool to investigate societal resilience and responses to climate stressors across diverse environments.
…
Peer reviewed Behavior changes through influence
Daria Soboleva | Published Friday, August 30, 2024The model is designed to simulate the behavior and decision-making processes of individuals (agents) in a social network. It aims to represent the changes in individual probability to take any action based on changes in attributes. The action is anything that can be reasonably influenced by the three influencing methods implemented in this model: peer pressure, social media, and state campaigns, and for which the user has a decision-making model. The model is implemented in the multi-agent programmable environment NetLogo 6.3.0.
Peer reviewed An IBM of a fishing fleet exploiting a pelagic resource and with a fisher management system. A preliminary version.
Paul Hart | Published Tuesday, March 19, 2024A fisher directed management system was describeded by Hart (2021). It was proposed that fishers should only be allowed to exploit a resource if they collaborated in a resource management system for which they would own and be collectively responsible for. As part of the system fishers would need to follow the rules of exploitation set by the group and provide a central unit with data with which to monitor the fishery. Any fisher not following the rules would at first be fined but eventually expelled from the fishery if he/she continued to act selfishly. This version of the model establishes the dynamics of a fleet of vessels and controls overfishing by imposing fines on fishers whose income is low and who are tempted to keep fishing beyond the set quota which is established each year depending on the abundance of the fish stock. This version will later be elaborated to have interactions between the fishers including pressure to comply with the norms set by the group and which could lead to a stable management system.
DARTS: an agent-based model of the global food system for studying its resilience to shocks
Hubert Fonteijn | Published Wednesday, November 22, 2023DARTS simulates food systems in which agents produce, consume and trade food. Here, food is a summary item that roughly corresponds to commodity food types (e.g. rice). No other food types are taken into account. Each food system (World) consists of its own distribution of agents, regions and connections between agents. Agents differ in their ability to produce food, earn off-farm income and trade food. The agents aim to satisfy their food requirements (which are fixed and equal across agents) by either their own food production or by food purchases. Each simulation step represents one month, in which agents can produce (if they have productive capacity and it is a harvest month for their region), earn off-farm income, trade food (both buy and sell) and consume food. We evaluate the performance of the food system by averaging the agents’ food satisfaction, which is defined as the ratio of the food consumed by each agent at the end of each month divided by her food requirement. At each step, any of the abovementioned attributes related to the agents’ ability to satisfy their food requirement can (temporarily) be shocked. These shocks include reducing the amount of food they produce, removing their ability to trade locally or internationally and reducing their cash savings. Food satisfaction is quantified (both immediately after the shock and in the year following the shock) to evaluate food security of a particular food system, both at the level of agent types (e.g. the urban poor and the rural poor) and at the systems level. Thus, the effects of shocks on food security can be related to the food system’s structure.
Influence mining framework for complex networks using igraph
Owais Hussain | Published Monday, September 25, 2023IMine is a flexible framework which can be adopt multiple criteria for convergence to solve Influence Minig problems. It can use any diffusion model, as well as resilience to compute the influence of a set of nodes base on the use case.
The code is written and tested on ‘R’ v3.5
An Agent-Based Model of Space Settlements
Anamaria Berea | Published Wednesday, August 09, 2023 | Last modified Wednesday, November 01, 2023Background: Establishing a human settlement on Mars is an incredibly complex engineering problem. The inhospitable nature of the Martian environment requires any habitat to be largely self-sustaining. Beyond mining a few basic minerals and water, the colonizers will be dependent on Earth resupply and replenishment of necessities via technological means, i.e., splitting Martian water into oxygen for breathing and hydrogen for fuel. Beyond the technical and engineering challenges, future colonists will also face psychological and human behavior challenges.
Objective: Our goal is to better understand the behavioral and psychological interactions of future Martian colonists through an Agent-Based Modeling (ABM simulation) approach. We seek to identify areas of consideration for planning a colony as well as propose a minimum initial population size required to create a stable colony.
Methods: Accounting for engineering and technological limitations, we draw on research regarding high performing teams in isolated and high stress environments (ex: submarines, Arctic exploration, ISS, war) to include the 4 NASA personality types within the ABM. Interactions between agents with different psychological profiles are modeled at the individual level, while global events such as accidents or delays in Earth resupply affect the colony as a whole.
Results: From our multiple simulations and scenarios (up to 28 Earth years), we found that an initial population of 22 was the minimum required to maintain a viable colony size over the long run. We also found that the Agreeable personality type was the one more likely to survive.
Conclusion We developed a simulation with easy to use GUI to explore various scenarios of human interactions (social, labor, economic, psychological) on a future colony on Mars. We included technological and engineering challenges, but our focus is on the behavioral and psychological effects on the sustainability of the colony on the long run. We find, contrary to other literature, that the minimum number of people with all personality types that can lead to a sustainable settlement is in the tens and not hundreds.
Displaying 10 of 83 results Any clear search