Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1221 results for "Ian M Hamilton" clear search
Mobility, Resource Harvesting and Robustness of Social-Ecological Systems
Irene Perez Ibarra | Published Monday, September 24, 2012 | Last modified Saturday, April 27, 2013The model is a stylized representation of a social-ecological system of agents moving and harvesting a renewable resource. The purpose is to analyze how mobility affects sustainability. Experiments changing agents’ mobility, landscape and information governments have can be run.
Perceived Scientific Value and Impact Factor
Davide Secchi Stephen J Cowley | Published Wednesday, April 12, 2017 | Last modified Monday, January 29, 2018The model explores the impact of journal metrics (e.g., the notorious impact factor) on the perception that academics have of an article’s scientific value.
PopComp
Andre Costopoulos | Published Thursday, December 10, 2020PopComp by Andre Costopoulos 2020
[email protected]
Licence: DWYWWI (Do whatever you want with it)
I use Netlogo to build a simple environmental change and population expansion and diffusion model. Patches have a carrying capacity and can host two kinds of populations (APop and BPop). Each time step, the carrying capacity of each patch has a given probability of increasing or decreasing up to a maximum proportion.
…
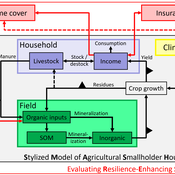
SMASH: Stylized Model of Agricultural Smallholder Households
Tim Williams | Published Tuesday, December 08, 2020The SMASH model is an agent-based model of rural smallholder households. It models households’ evolving income and wealth, which they earn through crop sales. Wealth is carried in the form of livestock, which are grazed on an external rangeland (exogenous) and can be bought/sold as investment/coping mechanisms. The model includes a stylized representation of soil nutrient dynamics, modeling the inflows and outflows of organic and inorganic nitrogen from each household’s field.
The model has been applied to assess the resilience-enhancing effects of two different farm-level adaptation strategies: legume cover cropping and crop insurance. These two strategies interact with the model through different mechanims - legume cover cropping through ecological mechanisms and crop insurance through financial mechanisms. The model can be used to investigate the short- and long-term effects of these strategies, as well as how they may differently benefit different types of household.
Emerging innovation niches model
Antonio Lopolito Richard Taylor Piergiuseppe Morone | Published Monday, September 22, 2014Objective of our model is to simulate the emergence and operation of a technological niches (TN) in terms of actors’ interaction. A TN can be conceived as protected socio-economic space where radical innovations are developed and tested
Cooperation Under Resources Pressure (CURP)
María Pereda José Manuel Galán Ordax José Santos | Published Monday, November 21, 2016 | Last modified Wednesday, April 25, 2018This is an agent-based model designed to explore the evolution of cooperation under changes in resources availability for a given population
On July 20th, James Holmes committed a mass shooting in a midnight showing of The Dark Knight Rises. The Aurora Colorado shooting was used as a test case to validate this framework for modeling mass shootings.
COOPER - Flood impacts over Cooperative Winemaking Systems
David Nortes Martinez David Nortes-Martinez | Published Thursday, February 08, 2018 | Last modified Friday, March 22, 2019The model simulates flood damages and its propagation through a cooperative, productive, farming system, characterized as a star-type network, where all elements in the system are connected one to each other through a central element.
Direct versus Connect
Steven Kimbrough | Published Sunday, January 15, 2023This NetLogo model is an implementation of the mostly verbal (and graphic) model in Jarret Walker’s Human Transit: How Clearer Thinking about Public Transit Can Enrich Our Communities and Our Lives (2011). Walker’s discussion is in the chapter “Connections or Complexity?”. See especially figure 12-2, which is on page 151.
In “Connections or Complexity?”, Walker frames the matter as involving a choice between two conflicting goals. The first goal is to minimize connections, the need to make transfers, in a transit system. People naturally prefer direct routes. The second goal is to minimize complexity. Why? Well, read the chapter, but as a general proposition we want to avoid unnecessary complexity with its attendant operating characteristics (confusing route plans in the case of transit) and management and maintenance challenges. With complexity general comes degraded robustness and resilience.
How do we, how can we, choose between these conflicting goals? The grand suggestion here is that we only choose indirectly, implicitly. In the present example of connections versus complexity we model various alternatives and compare them on measures of performance (MoP) other than complexity or connections per se. The suggestion is that connections and complexity are indicators of, heuristics for, other MoPs that are more fundamental, such as cost, robustness, energy use, etc., and it is these that we at bottom care most about. (Alternatively, and not inconsistently, we can view connections and complexity as two of many MoPs, with the larger issue to be resolve in light of many MoPs, including but not limited to complexity and connections.) We employ modeling to get a handle on these MoPs. Typically, there will be several, taking us thus to a multiple criteria decision making (MCDM) situation. That’s the big picture.
Peer reviewed COMMAND-AND-CONTROL
Farzaneh Davari | Published Tuesday, September 10, 2019 | Last modified Thursday, September 12, 2019The command and control policy in natural resource management, including water resources, is a longstanding established policy that has been theoretically and practically argued from the point of view of social-ecological complex systems. With the intention of making a system ecologically resilient, these days, policymakers apply the top-down policies of controlling communities through regulations. To explore how these policies may work and to understand whether the ecological goal can be achieved via command and control policy, this research uses the capacity of Agent-Based Modeling (ABM) as an experimental platform in the Urmia Lake Basin (ULB) in Iran, which is a social-ecological complex system and has gone through a drought process.
Despite the uncertainty of the restorability capacity of the lake, there has been a consensus on the possibility to artificially restore the lake through the nationally managed Urmia Lake Restoratoin Program (ULRP). To reduce water consumption in the Basin, the ULRP widely targets the agricultural sector and proposes the project of changing crop patterns from high-water-demand (HWD) to low-water-demand (LWD), which includes a component to control water consumption by establishing water-police forces.
Using a wide range of multidisciplinary studies about Urmia Lake at the Basin and sub-basins as well as qualitative information at micro-level as the main conceptual sources for the ABM, the findings under different strategies indicate that targeting crop patterns change by legally limiting farmers’ access to water could force farmers to change their crop patterns for a short period of time as long as the number of police constantly increases. However, it is not a sustainable policy for either changing the crop patterns nor restoring the lake.
Displaying 10 of 1221 results for "Ian M Hamilton" clear search