About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 6 of 6 results distributed cognition clear search
Team Structure and Task Performance
Davide Secchi Martin Neumann | Published Monday, August 05, 2024This model was designed to study resilience in organizations. Inspired by ethnographic work, it follows the simple goal to understand whether team structure affects the way in which tasks are performed. In so doing, it compares the ‘hybrid’ data-inspired structure with three more traditional structures (i.e. hierarchy, flexible/relaxed hierarchy, and anarchy/disorganization).
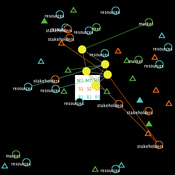
The S-uFUNK Model
Davide Secchi | Published Friday, March 17, 2023This version 2.1.0 of the uFunk model is about setting a business strategy (the S in the name) for an organization. A team of managers (or executives) meet and discuss various options on the strategy for the firm. There are three aspects that they have to agree on to set the strategic positioning of the organization.
The discussion is on market, stakeholders, and resources. The team (it could be a business strategy task force) considers various aspects of these three elements. The resources they use to develop the discussion can come from a traditional approach to strategy or from non-traditional means (e.g., so-called serious play, creativity and imagination techniques).
The S-uFunk 2.1.0 Model wants to understand to which extent cognitive means triggered by traditional and non-traditional resources affect the making of the strategy process.
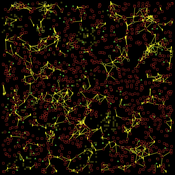
The Internal Organizational Plasticity Model (IOP 2.1.2)
Davide Secchi | Published Tuesday, June 02, 2020IOP 2.1.2 is an agent-based simulation model designed to explore the relations between (1) employees, (2) tasks and (3) resources in an organizational setting. By comparing alternative cognitive strategies in the use of resources, employees face increasingly demanding waves of tasks that derive by challenges the organization face to adapt to a turbulent environment. The assumption tested by this model is that a successful organizational adaptation, called plastic, is necessarily tied to how employees handle pressure coming from existing and new tasks. By comparing alternative cognitive strategies, connected to ‘docility’ (Simon, 1993; Secchi, 2011) and ‘extended’ cognition (Clark, 2003, Secchi & Cowley, 2018), IOP 2.1.2 is an attempt to indicate which strategy is most suitable and under which scenario.
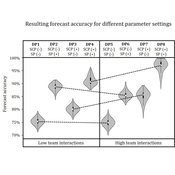
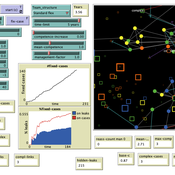
Demand Planning Model
Iris Lorscheid Jonas Hauke Matthias Meyer | Published Wednesday, October 04, 2017Demand planning requires processing of distributed information. In this process, individuals, their properties and interactions play a crucial role. This model is a computational testbed to investigate these aspects with respect to forecast accuracy.
Perceived Scientific Value and Impact Factor
Davide Secchi Stephen J Cowley | Published Wednesday, April 12, 2017 | Last modified Monday, January 29, 2018The model explores the impact of journal metrics (e.g., the notorious impact factor) on the perception that academics have of an article’s scientific value.
Intra-Organizational Bandwagon
Davide Secchi | Published Sunday, October 18, 2015The model simulates the process of widespread diffusion of something due to popularity (i.e., bandwagon) within an organization.