About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 311 results for "J Hall" clear search
The fourth and final extension to the standard Adder model to replicate the various interventions typically associated with Transition Experiments.
In-group favoritism due to friend selection strategies based on fixed tag and within-group reputation
Yutaka Nakai | Published Friday, March 28, 2014 | Last modified Friday, March 28, 2014An agent-based model simulates emergence of in-group favoritism. Agents adopt friend selection strategies using an invariable tag and reputations meaning how cooperative others are to a group. The reputation can be seen as a kind of public opinion.

An Agent-Based Model of Flood Risk and Insurance
J Dubbelboer I Nikolic K Jenkins J Hall | Published Monday, July 27, 2015 | Last modified Monday, October 03, 2016A model to show the effects of flood risk on a housing market; the role of flood protection for risk reduction; the working of the existing public-private flood insurance partnership in the UK, and the proposed scheme ‘Flood Re’.
“Food for all” (FFD)
Andreas Angourakis José Manuel Galán Andrea L Balbo José Santos | Published Friday, April 25, 2014 | Last modified Monday, April 08, 2019“Food for all” (FFD) is an agent-based model designed to study the evolution of cooperation for food storage. Households face the social dilemma of whether to store food in a corporate stock or to keep it in a private stock.
Wave When the Hale Wale (WWHW)
María Pereda José Manuel Galán Iván Briz I Godino Jorge Caro Débora Zurro Myriam Álvarez José Santos | Published Friday, October 10, 2014 | Last modified Wednesday, April 25, 2018WWHW is an agent-based model designed to allow the exploration of the emergence, resilience and evolution of cooperative behaviours in hunter-fisher-gatherer societies.
FilterBubbles_in_Carley1991
Benoît Desmarchelier | Published Wednesday, May 21, 2025The model is an extension of: Carley K. (1991) “A theory of group stability”, American Sociological Review, vol. 56, pp. 331-354.
The original model from Carley (1991) works as follows:
- Agents know or ignore a series of knowledge facts;
- At each time step, each agent i choose a partner j to interact with at random, with a probability of choice proportional to the degree of knowledge facts they have in common.
- Agents interact synchronously. As such, interaction happens only if the partnert j is not already busy interacting with someone else.
…
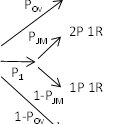
Replication of the Demographic Prisoner's Dilemma
Wolfgang Radax | Published Thursday, May 02, 2013The provided source code is the result of our efforts in replicating Epstein’s Demographic Prisoner’s Dilemma. The simulation model is written in Repast/J 3.1.
06 EiLab V1.40 – Entropic Index Laboratory
Garvin Boyle | Published Monday, March 19, 2018There is a new type of economic model called a capital exchange model, in which the biophysical economy is abstracted away, and the interaction of units of money is studied. Benatti, Drăgulescu and Yakovenko described at least eight capital exchange models – now referred to collectively as the BDY models – which are replicated as models A through H in EiLab. In recent writings, Yakovenko goes on to show that the entropy of these monetarily isolated systems rises to a maximal possible value as the model approaches steady state, and remains there, in analogy of the 2nd law of thermodynamics. EiLab demonstrates this behaviour. However, it must be noted that we are NOT talking about thermodynamic entropy. Heat is not being modeled – only simple exchanges of cash. But the same statistical formulae apply.
In three unpublished papers and a collection of diary notes and conference presentations (all available with this model), the concept of “entropic index” is defined for use in agent-based models (ABMs), with a particular interest in sustainable economics. Models I and J of EiLab are variations of the BDY model especially designed to study the Maximum Entropy Principle (MEP – model I) and the Maximum Entropy Production Principle (MEPP – model J) in ABMs. Both the MEPP and H.T. Odum’s Maximum Power Principle (MPP) have been proposed as organizing principles for complex adaptive systems. The MEPP and the MPP are two sides of the same coin, and an understanding of their implications is key, I believe, to understanding economic sustainability. Both of these proposed (and not widely accepted) principles describe the role of entropy in non-isolated systems in which complexity is generated and flourishes, such as ecosystems, and economies.
EiLab is one of several models exploring the dynamics of sustainable economics – PSoup, ModEco, EiLab, OamLab, MppLab, TpLab, and CmLab.
Peer reviewed Garbage can model Excel reconstruction
Smarzhevskiy Ivan | Published Tuesday, August 19, 2014 | Last modified Tuesday, July 30, 2019Reconstruction of the original code M. Cohen, J. March, and J. Olsen garbage can model, realized by means of Microsoft Office Excel 2010
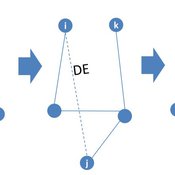
Adaptive model of a consumer advice network
Peng Shao | Published Monday, May 14, 2018In the consumer advice network, users with connections can interact with each other, and the network topology will change during the opinion interaction. When the opinion distance from i to j is greater than the confidence threshold, the two consumers cannot exchange opinions, and the link between them will disconnect with probability DE. Then, a link from node i to node k is established with probability CE and node i learning opinion from node k.
Displaying 10 of 311 results for "J Hall" clear search