Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 11 results vehicles clear search
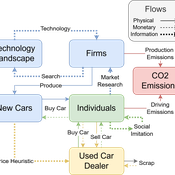
Driving in the wrong direction? A co-evolutionary model of electric vehicle adoption and innovation
Daniel Torren-Peraire | Published Friday, July 11, 2025Car-centric societies face substantial challenges in moving towards sustainable
mobility systems, with internal combustion engine vehicles remaining a major
source of emissions. Electric vehicles play a critical role in addressing this challenge, yet their diffusion depends on the interaction of consumer behaviour, firm
innovation, and policy incentives. This paper develops an agent-based model to
examine these dynamics, calibrated on the data for the state of California over
2001-2023. In the model, heterogeneous car users influenced by their social peers
…
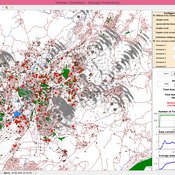
A Data-Driven Approach of Layout Evaluation for Electric Vehicle Charging Infrastructure Using Agent-Based Simulation and GIS
yue zhang | Published Thursday, September 21, 2023The development and popularisation of new energy vehicles have become a global consensus. The shortage and unreasonable layout of electric vehicle charging infrastructure (EVCI) have severely restricted the development of electric vehicles. In the literature, many methods can be used to optimise the layout of charging stations (CSs) for producing good layout designs. However, more realistic evaluation and validation should be used to assess and validate these layout options. This study suggested an agent-based simulation (ABS) model to evaluate the layout designs of EVCI and simulate the driving and charging behaviours of electric taxis (ETs). In the case study of Shenzhen, China, GPS trajectory data were used to extract the temporal and spatial patterns of ETs, which were then used to calibrate and validate the actions of ETs in the simulation. The ABS model was developed in a GIS context of an urban road network with travelling speeds of 24 h to account for the effects of traffic conditions. After the high-resolution simulation, evaluation results of the performance of EVCI and the behaviours of ETs can be provided in detail and in summary. Sensitivity analysis demonstrates the accuracy of simulation implementation and aids in understanding the effect of model parameters on system performance. Maximising the time satisfaction of ET users and reducing the workload variance of EVCI were the two goals of a multiobjective layout optimisation technique based on the Pareto frontier. The location plans for the new CS based on Pareto analysis can significantly enhance both metrics through simulation evaluation.
Peer reviewed Co-adoption of low-carbon household energy technologies
Mart van der Kam Maria Lagomarsino Elie Azar Ulf Hahnel David Parra | Published Tuesday, August 29, 2023 | Last modified Friday, February 23, 2024The model simulates the diffusion of four low-carbon energy technologies among households: photovoltaic (PV) solar panels, electric vehicles (EVs), heat pumps, and home batteries. We model household decision making as the decision marking of one person, the agent. The agent decides whether to adopt these technologies. Hereby, the model can be used to study co-adoption behaviour, thereby going beyond traditional diffusion models that focus on the adop-tion of single technologies. The combination of these technologies is of particular interest be-cause (1) using the energy generated by PV solar panels for EVs and heat pumps can reduce emissions associated with transport and heating, respectively, and (2) EVs, heat pumps, and home batteries can help to integrate PV solar panels in local electricity grids by offering flexible demand (EVs and heat pumps) and energy storage (home batteries and EVs), thereby reducing grid impacts and associated upgrading costs.
The purpose of the model is to represent realistic adoption and co-adoption behaviour. This is achieved by grounding the decision model on the risks-as-feelings model (Loewenstein et al., 2001), theory from environmental and social psychology, and empirically informing agent be-haviour by survey-data among 1469 people in the Swiss region Romandie.
The model can be used to construct scenarios for the diffusion of the four low-carbon energy technologies depending on different contexts, and as a virtual experimentation environment for ex ante evaluation of policy interventions to stimulate adoption and co-adoption.
This model presents an autonomous, two-lane driving environment with a single lane-closure that can be toggled. The four driving scenarios - two baseline cases (based on the real-world) and two experimental setups - are as follows:
- Baseline-1 is where cars are not informed of the lane closure.
- Baseline-2 is where a Red Zone is marked wherein cars are informed of the lane closure ahead.
- Strategy-1 is where cars use a co-operative driving strategy - FAS. <sup>[1]</sup>
- Strategy-2 is a variant of Strategy-1 and uses comfortable deceleration values instead of the vehicle’s limit.
…
3D Urban Traffic Simulator (ABM) in Unity
Daniel Birks Sedar Olmez Obi Thompson Sargoni Alison Heppenstall Annabel Whipp Ed Manley | Published Friday, January 22, 2021 | Last modified Monday, March 22, 2021The Urban Traffic Simulator is an agent-based model developed in the Unity platform. The model allows the user to simulate several autonomous vehicles (AVs) and tune granular parameters such as vehicle downforce, adherence to speed limits, top speed in mph and mass. The model allows researchers to tune these parameters, run the simulator for a given period and export data from the model for analysis (an example is provided in Jupyter Notebook).
The data the model is currently able to output are the following:
…
Hybrid individual- and particle-based simulation model and data on air pollutants and vertical greenery systems in the city of Yerevan, Armenia
Andranik Akopov | Published Friday, June 19, 2020Urban greenery such as vertical greenery systems (VGS) can effectively absorb air pollutants emitted by different agents, such as vehicles and manufacturing enterprises. The main challenge is how to protect socially important objects, such as kindergartens, from the influence if air pollution with the minimum of expenditure. There is proposed the hybrid individual- and particle-based model of interactions between vertical greenery systems and air pollutants to identify optimal locations of tree clusters and high-rise buildings where horizontal greenery systems and VGS should be implemented, respectively. The model is implemented in the AnyLogic simulation tool.
Peer reviewed Charging behaviour of electric vehicle drivers
Wilfried van Sark Annemijn Peters Floor Alkemade Mart van der Kam | Published Wednesday, May 08, 2019 | Last modified Tuesday, April 14, 2020This model was developed to study the combination of electric vehicles (EVs) and intermitten renewable energy sources. The model presents an EV fleet in a fictional area, divided into a residential area, an office area and commercial area. The area has renewable energy sources: wind and PV solar panels. The agents can be encouraged to charge their electric vehicles at times of renewable energy surplus by introducing different policy interventions. Other interesting variables in the model are the installed renewable energy sources, EV fleet composition and available charging infrastructure. Where possible, use emperical data as input for our model. We expand upon previous models by incorporating environmental self-identity and range anxiety as agent variables.
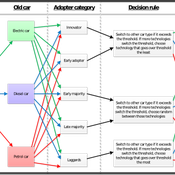
STECCAR: a simulation of the diffusion of electric cars
A Kangur Lc Verbrugge W Jager M Bockarjova | Published Sunday, November 29, 2015In this Repast model the ‘Consumat’ cognitive framework is applied to an ABM of the Dutch car market. Different policy scenarios can be selected or created to examine their effect on the diffusion of EVs.
(De-)Stabilising effect of diffusions
Julia Kasmire Bert Van Meeuwen Cornelis Eikelboom | Published Tuesday, August 11, 2015What is stable: the large but coordinated change during a diffusion or the small but constant and uncoordinated changes during a dynamic equilibrium? This agent-based model of a diffusion creates output that reveal insights for system stability.
Last Mile Commuter Behavior Model
Dean Massey Moira Zellner Yoram Shiftan Jonathan Levine Maria Arquero | Published Friday, November 07, 2014 | Last modified Friday, November 07, 2014We represent commuters and their preferences for transportation cost, time and safety. Agents assess their options via their preferences, their environment, and the modes available. The model has policy levers to test impact on last-mile problem.
Displaying 10 of 11 results vehicles clear search