Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1229 results for "Lee-Ann Sutherland" clear search
Finance and Market Concentration Using Agent-Based Modeling: Evidence from South Korea
Yunkyeong Seo Zeynep Elif Altiner Sumin Lee Ilchul Moon Taesub Yun | Published Friday, March 28, 2025Amidst the global trend of increasing market concentration, this paper examines the role of finance
in shaping it. Using Agent-Based Modeling (ABM), we analyze the impact of financial policies on market concentration
and its closely related variables: economic growth and labor income share. We extend the Keynes
meets Schumpeter (K+S) model by incorporating two critical assumptions that influence market concentration.
Policy experiments are conducted with a model validated against historical trends in South Korea. For policy
variables, the Debt-to-Sales Ratio (DSR) limit and interest rate are used as levers to regulate the quantity and
…
Value Chain Marketing (VCM)
Stephanie Hintze | Published Monday, April 14, 2014 | Last modified Thursday, October 16, 2014Inspired by the SKIN model, the basic concept here is to model the acceptance and implementation of supplier innovations. This model includes three types of agents comprising suppliers, manufacturers and applicators.
Social Identity Model of Protest Emergence (SIMPE)
Cristina Chueca Del Cerro | Published Friday, March 17, 2023The Social Identity Model of Protest Emergence (SIMPE), an agent-based model of national identity and protest mobilisations.
I developed this model for my PhD project, “Polarisation and Protest Mobilisation Around Secessionist Movements: an Agent-Based Model of Online and Offline Social Networks”, at the University of Glasgow (2019-2023).
The purpose of this model is to simulate protest emergence in a given country where there is an independence movement, fostering the self-categorisation process of national identification. In order to contextualised SIMPE, I have used Catalonia, where an ongoing secessionist movement since 2011 has been present, national identity has shown signs of polarisation, and where numerous mobilisations have taken place over the last decade. Data from the Catalan Centre of Opinion Studies (CEO) has been used to inform some of the model parameters.
…
Peer reviewed ABM for Social Cohesion and Wellbeing(ABMSCWB)
Taseer Salahuddin Hasan Vergil | Published Wednesday, June 25, 2025ABM model studying impact of social cohesion on wellbeing of a society. Ibn Khaldun’s cyclical theory of history is being used as the theoretical lens along with some other theories. Social cohesion is measured as TSC = (TVE + 2 * (TPI * TPL - TNI * TNL))/((TPI+TNI))
Where
TSC total-social-cohesion ; Variable for social cohesion
TPI total-positive-interactions ; Count of positive interactions
TNI total-negative-interactions ; Count of negative interactions
TPL total-positive-learning ; Count of positive learning outcomes
…
A simple emulation-based computational model
Carlos M Fernández-Márquez Francisco J Vázquez | Published Tuesday, May 21, 2013 | Last modified Tuesday, February 05, 2019Emulation is one of the simplest and most common mechanisms of social interaction. In this paper we introduce a descriptive computational model that attempts to capture the underlying dynamics of social processes led by emulation.
Peer reviewed ana-wag
Géraldine Abrami Mamadou Diallo Stefano Farolfi Bruno Bonté Nils Ferrand Wanda Aquae Gaudi | Published Monday, February 13, 2017 | Last modified Friday, May 10, 2019The ana-wag model, for Analyse Wat-A-Game (WAG), is a NetLogo version of the WAG role playing game. It enables to model a river catchment with the graphical modelling language WAG and to play it as a network-game (each player is a water user).
Multistate modeling extended by behavioral rules
Frans Willekens Sabine Zinn Matthias Leuchter Anna Klabunde | Published Wednesday, August 03, 2016 | Last modified Tuesday, March 13, 2018Toolkit to specify demographic multistate model with a behavioural element linking intentions to behaviour
Thoughtless conformity and spread of norms in an artificial society (Grid Model)
Muhammad Azfar Nisar | Published Tuesday, May 27, 2014This model is a small extension (rectangular layout) of Joshua Epstein’s (2001) model on development of thoughtless conformity in an artificial society of agents.
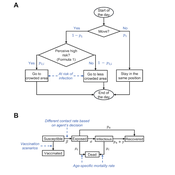
Peer reviewed Behavioral Dynamics of Epidemic Trajectories and Vaccination Strategies: An Agent-Based Model
Ziyuan Zhang | Published Tuesday, December 10, 2024This agent-based model explores the dynamics between human behavior and vaccination strategies during COVID-19 pandemics. It examines how individual risk perceptions influence behaviors and subsequently affect epidemic outcomes in a simulated metropolitan area resembling New York City from December 2020 to May 2021.
Agents modify their daily activities—deciding whether to travel to densely populated urban centers or stay in less crowded neighborhoods—based on their risk perception. This perception is influenced by factors such as risk perception threshold, risk tolerance personality, mortality rate, disease prevalence, and the average number of contacts per agent in crowded settings. Agent characteristics are carefully calibrated to reflect New York City demographics, including age distribution and variations in infection probability and mortality rates across these groups. The agents can experience six distinct health statuses: susceptible, exposed, infectious, recovered from infection, dead, and vaccinated (SEIRDV). The simulation focuses on the Iota and Alpha variants, the dominant strains in New York City during the period.
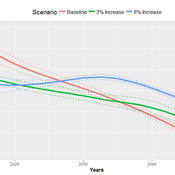
We simulate six scenarios divided into three main categories:
1. A baseline model without vaccinations where agents exhibit no risk perception and are indifferent to virus transmission and disease prevalence.
…

Peer reviewed Descriptive Norm and Fraud Dynamics
Alexandra Eckert Matthias Meyer Christian Stindt | Published Tuesday, January 07, 2025 | Last modified Tuesday, March 24, 2026The “Descriptive Norm and Fraud Dynamics” model demonstrates how fraudulent behavior can either proliferate or be contained within non-hierarchical organizations, such as peer networks, through social influence taking the form of a descriptive norm. This model expands on the fraud triangle theory, which posits that an individual must concurrently possess a financial motive, perceive an opportunity, and hold a pro-fraud attitude to engage in fraudulent activities (red agent). In the absence of any of these elements, the individual will act honestly (green agent).
The model explores variations in a descriptive norm mechanism, ranging from local distorted knowledge to global perfect knowledge. In the case of local distorted knowledge, agents primarily rely on information from their first-degree colleagues. This knowledge is often distorted because agents are slow to update their empirical expectations, which are only partially revised after one-to-one interactions. On the other end of the spectrum, local perfect knowledge is achieved by incorporating a secondary source of information into the agents’ decision-making process. Here, accurate information provided by an observer is used to update empirical expectations.
The model shows that the same variation of the descriptive norm mechanism could lead to varying aggregate fraud levels across different fraud categories. Two empirically measured norm sensitivity distributions associated with different fraud categories can be selected into the model to see the different aggregate outcomes.
Displaying 10 of 1229 results for "Lee-Ann Sutherland" clear search