Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 36 results success clear search
Peer reviewed E³-MAN. An Institutionally-guided multi-agent. Model for fair and efficient negotiation.
José luis bustelo | Published Monday, September 01, 2025Negotiation plays a fundamental role in shaping human societies, underpinning conflict resolution, institutional design, and economic coordination. This article introduces E³-MAN, a novel multi-agent model for negotiation that integrates individual utility maximization with fairness and institutional legitimacy. Unlike classical approaches grounded solely in game theory, our model incorporates Bayesian opponent modeling, transfer learning from past negotiation domains, and fallback institutional rules to resolve deadlocks. Agents interact in dynamic environments characterized by strategic heterogeneity and asymmetric information, negotiating over multidimensional issues under time constraints. Through extensive simulation experiments, we compare E³-MAN against the Nash bargaining solution and equal-split baselines using key performance metrics: utilitarian efficiency, Nash social welfare, Jain fairness index, Gini coefficient, and institutional compliance. Results show that E³-MAN achieves near-optimal efficiency while significantly improving distributive equity and agreement stability. A legal application simulating multilateral labor arbitration demonstrates that institutional default rules foster more balanced outcomes and increase negotiation success rates from 58% to 98%. By combining computational intelligence with normative constraints, this work contributes to the growing field of socially aware autonomous agents. It offers a virtual laboratory for exploring how simple institutional interventions can enhance justice, cooperation, and robustness in complex socio-legal systems.
The SAFIRe model : Simulation of Agents for Fertility, Integrated Energy, Food security, and Reforestation
Etienne DELAY Lucas Broutin | Published Thursday, June 12, 2025The SAFIRe model (Simulation of Agents for Fertility, Integrated Energy, Food Security, and Reforestation) is an agent-based model co-developed with rural communities in Senegal’s Groundnut Basin. Its purpose is to explore how local farming and pastoral practices affect the regeneration of Faidherbia albida trees, which are essential for maintaining soil fertility and supporting food security through improved millet production. The model supports collective reflection on how different social and ecological factors interact, particularly around firewood demand, livestock pressure, and agricultural intensification.
The model simulates a 100-hectare agricultural landscape where agents (farmers, shepherds, woodcutters, and supervisors) interact with trees, land parcels, and each other. It incorporates seasonality, crop rotation, tree growth and cutting, livestock feeding behaviors, and farmers’ engagement in sapling protection through Assisted Natural Regeneration (ANR). Two types of surveillance strategies are compared: community-led monitoring and delegated surveillance by forestry authorities. Farmer engagement evolves over time based on peer influence, meeting participation, and the success of visible tree regeneration efforts.
SAFIRe integrates participatory modeling (ComMod and ComExp) and a backcasting approach (ACARDI) to co-produce scenarios rooted in local aspirations. It was explored using the OpenMole platform, allowing stakeholders to test a wide range of future trajectories and analyze the sensitivity of key parameters (e.g., discussion frequency, time in fields). The model’s outcomes not only revealed unexpected insights—such as the hidden role of farmers in tree loss—but also led to real-world actions, including community nursery creation and behavioral shifts toward tree care. SAFIRe illustrates how agent-based modeling can become a tool for social learning and collective action in socio-ecological systems.
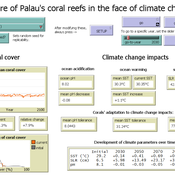
Development of coral reefs under climate change impacts and adaptation options
Nina Preußler | Published Friday, May 30, 2025This NetLogo model simulates how coral reefs around the islands of Palau would develop under different emission scenarios and with selected adaptation strategies. Reef health is indicated by coral cover (%) and is affected by four major climate change impacts: increasing sea surface temperature, sea level rise, ocean acidification, and more intense typhoons. The model differentiates between inner and outer reefs, with the former naturally adapted to warmer, more acidic waters. The simulation includes bleaching events and possible recovery. In addition, the user can choose between different coral transplantation strategies as well as regulate natural thermal adaptation rates.
Soy2Grow-ABM-V1
Siavash Farahbakhsh | Published Monday, January 20, 2025The Soy2Grow ABM aims to simulate the adoption of soybean production in Flanders, Belgium. The model primarily considers two types of agents as farmers: 1) arable and 2) dairy farmers. Each farmer, based on its type, assesses the feasibility of adopting soybean cultivation. The feasibility assessment depends on many interrelated factors, including price, production costs, yield, disease, drought (i.e., environmental stress), social pressure, group formations, learning and skills, risk-taking, subsidies, target profit margins, tolerance to bad experiences, etc. Moreover, after adopting soybean production, agents will reassess their performance. If their performance is unsatisfactory, an agent may opt out of soy production. Therefore, one of the main outcomes to look for in the model is the number of adopters over time.
The main agents are farmers. Generally, factors influencing farmers’ decision-making are divided into seven main areas: 1) external environmental factors, 2) cooperation and learning (with slight differences depending on whether they are arable or dairy farmers), 3) crop-specific factors, 4) economics, 5) support frameworks, 6) behavioral factors, and 7) the role of mobile toasters (applicable only to dairy farmers).
Moreover, factors not only influence decision-making but also interact with each other. Specifically, external environmental factors (i.e., stress) will result in lower yield and quality (protein content). The reducing effect, identified during participatory workshops, can reach 50 %. Skills can grow and improve yield; however, their growth has a limit and follows different learning curves depending on how individualistic a farmer is. During participatory workshops, it was identified that, contrary to cooperative farmers, individualistic farmers may learn faster and reach their limits more quickly. Furthermore, subsidies directly affect revenues and profit margins; however, their impact may disappear when they are removed. In the case of dairy farmers, mobile toasters play an important role, adding toasting and processing costs to those producing soy for their animal feed consumption.
Last but not least, behavioral factors directly influence the final adoption decision. For example, high risk-taking farmers may adopt faster, whereas more conservative farmers may wait for their neighbors to adopt first. Farmers may evaluate their success based on their own targets and may also consider other crops rather than soy.
Peer reviewed AgModel
Isaac Ullah | Published Friday, December 06, 2024AgModel is an agent-based model of the forager-farmer transition. The model consists of a single software agent that, conceptually, can be thought of as a single hunter-gather community (i.e., a co-residential group that shares in subsistence activities and decision making). The agent has several characteristics, including a population of human foragers, intrinsic birth and death rates, an annual total energy need, and an available amount of foraging labor. The model assumes a central-place foraging strategy in a fixed territory for a two-resource economy: cereal grains and prey animals. The territory has a fixed number of patches, and a starting number of prey. While the model is not spatially explicit, it does assume some spatiality of resources by including search times.
Demographic and environmental components of the simulation occur and are updated at an annual temporal resolution, but foraging decisions are “event” based so that many such decisions will be made in each year. Thus, each new year, the foraging agent must undertake a series of optimal foraging decisions based on its current knowledge of the availability of cereals and prey animals. Other resources are not accounted for in the model directly, but can be assumed for by adjusting the total number of required annual energy intake that the foraging agent uses to calculate its cereal and prey animal foraging decisions. The agent proceeds to balance the net benefits of the chance of finding, processing, and consuming a prey animal, versus that of finding a cereal patch, and processing and consuming that cereal. These decisions continue until the annual kcal target is reached (balanced on the current human population). If the agent consumes all available resources in a given year, it may “starve”. Starvation will affect birth and death rates, as will foraging success, and so the population will increase or decrease according to a probabilistic function (perturbed by some stochasticity) and the agent’s foraging success or failure. The agent is also constrained by labor caps, set by the modeler at model initialization. If the agent expends its yearly budget of person-hours for hunting or foraging, then the agent can no longer do those activities that year, and it may starve.
Foragers choose to either expend their annual labor budget either hunting prey animals or harvesting cereal patches. If the agent chooses to harvest prey animals, they will expend energy searching for and processing prey animals. prey animals search times are density dependent, and the number of prey animals per encounter and handling times can be altered in the model parameterization (e.g. to increase the payoff per encounter). Prey animal populations are also subject to intrinsic birth and death rates with the addition of additional deaths caused by human predation. A small amount of prey animals may “migrate” into the territory each year. This prevents prey animals populations from complete decimation, but also may be used to model increased distances of logistic mobility (or, perhaps, even residential mobility within a larger territory).
…
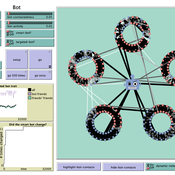
How do bots influence beliefs on social media? Why do beliefs propagated by social bots spread far and wide, yet does their direct influence appear to be limited?
This model extends Axelrod’s model for the dissemination of culture (1997), with a social bot agent–an agent who only sends information and cannot be influenced themselves. The basic network is a ring network with N agents connected to k nearest neighbors. The agents have a cultural profile with F features and Q traits per feature. When two agents interact, the sending agent sends the trait of a randomly chosen feature to the receiving agent, who adopts this trait with a probability equal to their similarity. To this network, we add a bot agents who is given a unique trait on the first feature and is connected to a proportion of the agents in the model equal to ‘bot-connectedness’. At each timestep, the bot is chosen to spread one of its traits to its neighbors with a probility equal to ‘bot-activity’.
The main finding in this model is that, generally, bot activity and bot connectedness are both negatively related to the success of the bot in spreading its unique message, in equilibrium. The mechanism is that very active and well connected bots quickly influence their direct contacts, who then grow too dissimilar from the bot’s indirect contacts to quickly, preventing indirect influence. A less active and less connected bot leaves more space for indirect influence to occur, and is therefore more successful in the long run.
The Epistemic Role of Diversity in Juries
Aaron Bramson Patrick Grim Daniel J Singer Jiin Jung William J. Berger Bennett Holman | Published Wednesday, August 16, 2023This model is linked to the paper “The Epistemic Role of Diversity in Juries: An Agent-Based Model”. There are many version of this model, but the current version focuses on the role of diversity in whether juries reach correct verdicts. Using this agent-based model, we argue that diversity can play at least four importantly different roles in affecting jury verdicts. (1) Where different subgroups have access to different information, equal representation can strengthen epistemic jury success. (2) If one subgroup has access to particularly strong evidence, epistemic success may demand participation by that group. (3) Diversity can also reduce the redundancy of the information on which a jury focuses, which can have a positive impact. (4) Finally, and most surprisingly, we show that limiting communication between diverse groups in juries can favor epistemic success as well.
Residents planned behaviour of waste sorting to explore urban situations
Jonathan Edgardo Cohen | Published Wednesday, June 07, 2023 | Last modified Thursday, March 14, 2024Municipal waste management (MWM) is essential for urban development. Efficient waste management is essential for providing a healthy and clean environment, for reducing GHGs and for increasing the amount of material recycled. Waste separation at source is perceived as an effective MWM strategy that relays on the behaviour of citizens to separate their waste in different fractions. The strategy is straightforward, and many cities have adopted the strategy or are working to implement it. However, the success of such strategy depends on adequate understanding of the drivers of the behaviour of proper waste sorting. The Theory of Planned Behaviour (TPB) has been extensively applied to explain the behaviour of waste sorting and contributes to determining the importance of different psychological constructs. Although, evidence shows its validity in different contexts, without exploring how urban policies and the built environment affect the TPB, its application to urban challenges remains unlocked. To date, limited research has focused in exposing how different urban situations such as: distance to waste bins, conditions of recycling facilities or information campaigns affect the planned behaviour of waste separation. To fill this gap, an agent-based model (ABM) of residents capable of planning the behaviour of waste separation is developed. The study is a proof of concept that shows how the TPB can be combined with simulations to provide useful insights to evaluate different urban planning situations. In this paper we depart from a survey to capture TPB constructs, then Structural Equation Modelling (SEM) is used to validate the TPB hypothesis and extract the drivers of the behaviour of waste sorting. Finally, the development of the ABM is detailed and the drivers of the TPB are used to determine how the residents behave. A low-density and a high-density urban scenario are used to extract policy insights. In conclusion, the integration between the TPB into ABMs can help to bridge the knowledge gap between can provide a useful insight to analysing and evaluating waste management scenarios in urban areas. By better understanding individual waste sorting behaviour, we can develop more effective policies and interventions to promote sustainable waste management practices.
The role of dispersal, selection intensity, and extirpation risk in resilience to climate change: a trait-based modeling approach
Jessica Mo P. David Polly | Published Monday, February 07, 2022This NetLogo model simulates trait-based biotic responses to climate change in an environmentally heterogeneous continent in an evolving clade, the species of which are each represented by local populations that disperse and interbreed; they also are subject to selection, genetic drift, and local extirpation. We simulated mammalian herbivores, whose success depends on tooth crown height, vegetation type, precipitation and grit. This model investigates the role of dispersal, selection, extirpation, and other factors contribute to resilience under three climate change scenarios.
A Comparative Study on Apprenticeship Systems Using Agent-Based Simulation
Amir Hosein Afshar Sedigh | Published Thursday, October 21, 2021The model is suitable to investigate the effects of different characteristics of apprenticeship programmes both in historical and contemporary societies. The model is built considering five societies, using an agent-based simulation model, we identified six main characteristics which impact the success of an apprenticeship programme in a society, which we measured by considering three parameters, namely the number of skilled agents produced by the apprenticeships, programme completion, and the contribution of programmes in the Gross Domestic Income (GDI) of the society. We investigate different definitions for success of an apprenticeship and some hypothetical societies to test some common beliefs about apprenticeships performance. The model also shows the number of unemployed agents given their work-based skills, wages, and the number of small and large companies who participate in training agents. The model enables exploring the impact of parameters, such as initial wages and the number of training years, along with the stated policies on the system.
Displaying 10 of 36 results success clear search