Agent-based model of WiFi tracking system in urban environment (1.0.0)
The model (written in basic Matlab, convertable to Octave) provides proof-of-concept for a sensor network system for tracking WiFi users in outdoor urban environments. Sensors are fixed, and are capable of measuring signal power from users’ WiFi devices. The location algorithm takes into account the effects of power control, and is self-calibrating in that the signal power model used by the algorithm is adjusted and improved as part of the operation of the network.
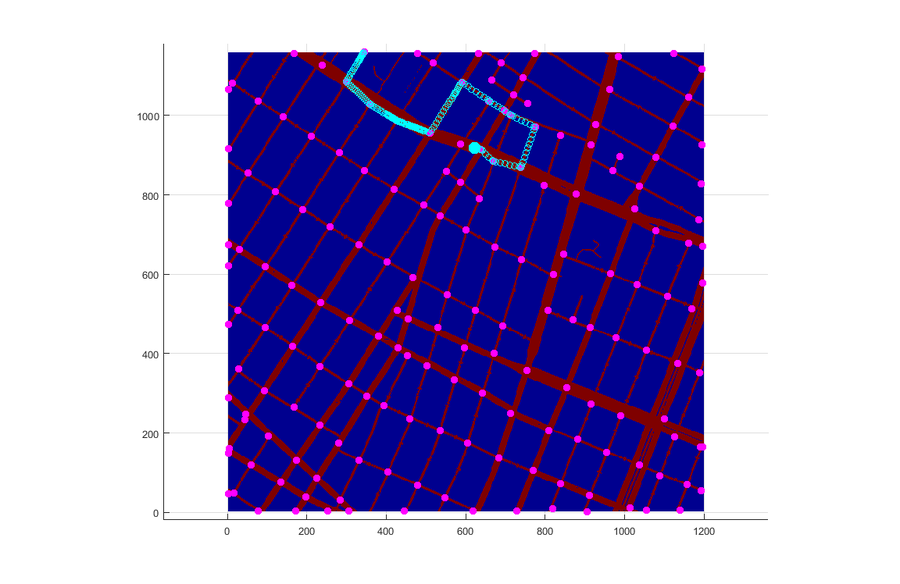
The Matlab code includes testbench files to generate simulation results which verify the system’s performance. The simulation scenario is based on a 1.5 km2 area of lower Manhattan, The self-calibration mechanism was verified for initial rms (root mean square) errors of up to 12 dB in the channel power estimates: rms errors were reduced by over 60% in 300 track-hours, in systems with limited power control. Under typical operating conditions with (without) power control, location rms errors are about 8.5 (5) meters with 90% accuracy within 9 (13) meters, for both pedestrian and vehicular users. The distance error distributions for smaller distances (<30 m) are well-approximated by an exponential distribution, while the distributions for large distance errors have fat tails.
Also included is an Octave program which utilizes an integer linear programming algorithm to determine sensor placement for networks with reduced number of sensors. In our test case, the algorithm produces a network with 18.5% fewer sensors with comparable accuracy estimation performance.
Release Notes
Run testbench files to duplicate results.
Associated Publications
Christopher Thron, Khoi Tran, Douglas Smith, Daniel Benincasa,
“Design and Simulation of Sensor Networks for Tracking Wifi Users in Outdoor Urban Environments”, Proceedings SPIE (2017)
Agent-based model of WiFi tracking system in urban environment 1.0.0
Submitted byChristopher ThronPublished Apr 21, 2017
Last modified Feb 23, 2018
The model (written in basic Matlab, convertable to Octave) provides proof-of-concept for a sensor network system for tracking WiFi users in outdoor urban environments. Sensors are fixed, and are capable of measuring signal power from users’ WiFi devices. The location algorithm takes into account the effects of power control, and is self-calibrating in that the signal power model used by the algorithm is adjusted and improved as part of the operation of the network.
The Matlab code includes testbench files to generate simulation results which verify the system’s performance. The simulation scenario is based on a 1.5 km2 area of lower Manhattan, The self-calibration mechanism was verified for initial rms (root mean square) errors of up to 12 dB in the channel power estimates: rms errors were reduced by over 60% in 300 track-hours, in systems with limited power control. Under typical operating conditions with (without) power control, location rms errors are about 8.5 (5) meters with 90% accuracy within 9 (13) meters, for both pedestrian and vehicular users. The distance error distributions for smaller distances (<30 m) are well-approximated by an exponential distribution, while the distributions for large distance errors have fat tails.
Also included is an Octave program which utilizes an integer linear programming algorithm to determine sensor placement for networks with reduced number of sensors. In our test case, the algorithm produces a network with 18.5% fewer sensors with comparable accuracy estimation performance.
Release Notes
Run testbench files to duplicate results.
Cite this Model
Christopher Thron, Khoi Tran (2017, April 21). “Agent-based model of WiFi tracking system in urban environment” (Version 1.0.0). CoMSES Computational Model Library. Retrieved from: https://www.comses.net/codebases/5611/releases/1.0.0/
Associated Publication(s)
Christopher Thron, Khoi Tran, Douglas Smith, Daniel Benincasa,
“Design and Simulation of Sensor Networks for Tracking Wifi Users in Outdoor Urban Environments”, Proceedings SPIE (2017)
Create an Open Code Badge that links to this model more info
This model has not been reviewed by CoMSES Net and should be independently reviewed to
meet the Open Code Badge guidelines.
You can use the following HTML or Markdown code to create an Open Code Badge that links to
version 1.0.0
of this computational model.
This website uses cookies and Google Analytics to help us track user engagement and improve our site. If
you'd like to know more information about what data we collect and why, please see
our data privacy policy. If you continue to use this site, you consent to
our use of cookies.